Sensor Demo
DHT22
一、硬件信息
duo开发板引脚
GitHub链接:https://github.com/milkv-duo/duo-files/blob/main/duo/hardware/duo-schematic-v1.2.pdf

DHT22温湿度传感器
dfrobotwiki链接如下:https://wiki.dfrobot.com.cn/_SKU_SEN0137_%E9%AB%98%E7%B2%BE%E5%BA%A6DHT22%E6%B8%A9%E6%B9%BF%E5%BA%A6%E4%BC%A0%E6%84%9F%E5%99%A8
DHT22 温湿度传感器是一款多功能且经济高效的传感器,用于测量环境温度和湿度,应用范围广泛。它基于数字信号输出,可以提供高精度测量,温度分辨率为 0.1 摄氏度,湿度分辨率为 0.1%。该传感器采用电容式湿度传感元件和热敏电阻分别测量湿度和温度。DHT22 传感器的功耗也相对较低,可在 3.3V 至 5V 的电压范围内工作,使其适用于电池供电项目。此外,该传感器具有长期稳定性和高可靠性,这使其成为暖通空调等各种应用的完美选择,气象站和室内空气质量监测系统。
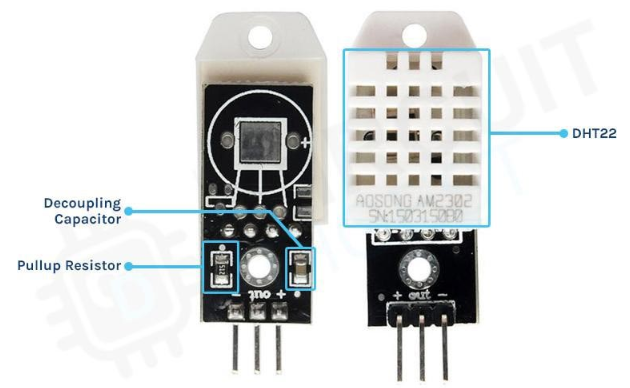
传感器模块
DHT22模块共有3个引脚。而DHT22 裸骨传感器有 4 个引脚。如果我们考虑三个引脚中的模块,其中两个是电源引脚,一个是数据引脚。如果我们查看 4 针传感器,则额外的针是 NC 针,它没有任何功能。模块和传感器的引脚图如下所示。

DATA用于 1-Wire 通信的数据引脚。
GND模块的接地引脚。
VCC模块的电源引脚。
Not Used在此传感器中,未使用此引脚。
DHT22 传感器模块的零件标记
除传感器外,DHT22 模块在 PCB 上仅包含两个组件。一个上拉电阻和一个去耦电容,DHT22模块的零件标记如下所示。
DHT22模块电路图
DHT22温湿度传感器模块完整原理图如下图:

DHT22模块的原理图如上所示。如前所述,董事会只有几名成员。VCC 和 GND 引脚直接连接到 DHT22,上拉电阻连接到 DATA 引脚。钽电容和多层电容提供足够的滤波。作为电源指示,在某些 PCB 中,您可以找到 LED 指示灯,但对于大多数电路板来说,LED 是不存在的。
DHT22传感器模块常见问题
问:简而言之,DHT22 是什么?
DHT22 是 DHT11 传感器的更昂贵版本,显然具有更好的规格。其温度测量范围为 -40 至 +125 摄氏度,精度为 +-0.5 度,而 DHT11 温度范围为 0 至 50 摄氏度,精度为 +-2 度。
问:DHT22 是模拟的还是数��字的?
DHT-22(也称为 AM2302)是一种数字输出相对湿度和温度传感器。
问:DHT22 防水吗?
不,它不防水。
问:DHT11 传感器的采样率是多少?
DHT22 的采样率为 1Hz。
问:DHT22 使用什么协议?
DHT22 传感器使用专有的单总线通信协议,可以通过计算的定时脉冲发送和接收数据。
DHT22 是如何工作的?
如果您使用的是原装 DHT22 传感器,那么它里面会有一个NTC热敏电阻和传感器模块,但是您在市场上可以找到的大多数传感器大多是非原装零件,并且在里面您会发现一个小传感器,您可以在下图中看到。

湿度传感元件由夹在两个电极之间的保湿基板组成。当基材吸收水分时,两个电极之间的电阻会降低。两个电极之间的电阻变化与相对湿度成正比。较高的相对湿度会降低电极之间的电阻,而较低的相对湿度会增加电极之间的电阻。这种电阻变化是通过板载 MCU 的 ADC 测量的,并计算出相对湿度。
每个DHT22元件都经过实验室严格校准,湿度校准极其准确。校准系数作为程序存储在 OTP 存储器中,供传感器内部信号检测过程使用。
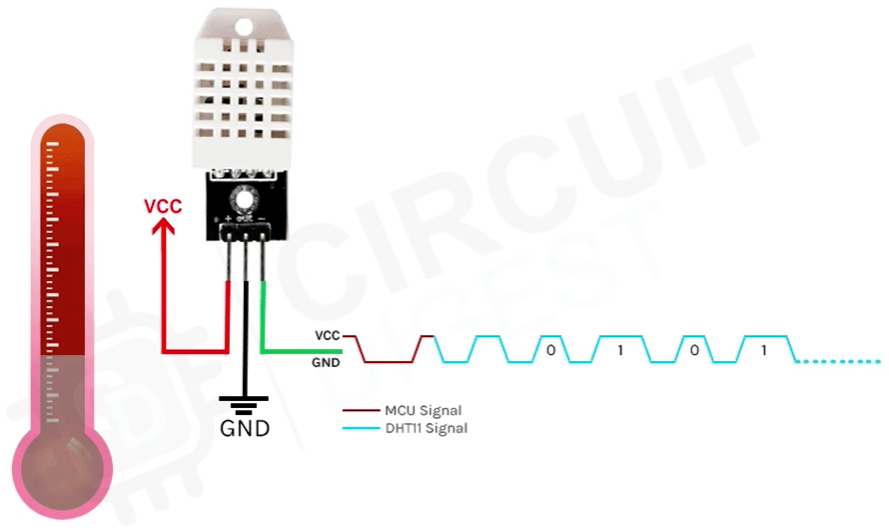
DHT22单总线通信协议
单总线通信协议用于与 DHT22 和微控制器通信。样本数据大约需要 4 毫秒才能运行完毕。此数据由小数部分和整数部分组成。总数据为 40 位长,为 MSB 格式。数据格式如下:8bit 整数RH 数据+8bit 十进制RH 数据+8bit 整数T 数据+8bit 十进制T 数据+8bit 校验和。如果数据传输正确,则校验和应为“8bit整数RH数据+8bit十进制RH数据+8bit整数T数据+8bit十进制T数据”的最后8bit。
当MCU发送启动信号DHT从低功耗模式变为运行模式,并将所有40位数据转储给微控制器,微控制器读取数据并根据二进制数据计算温度和湿度。
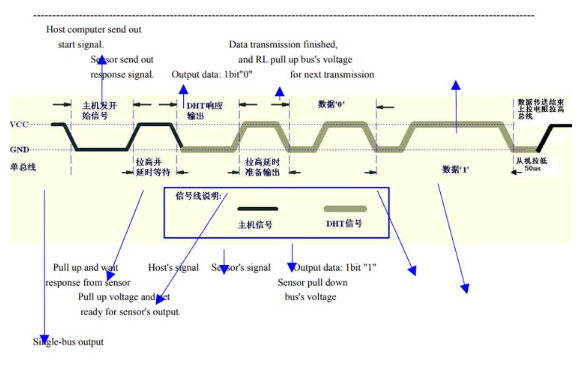
上图显示了数据通信如何与微控制器和 DHT22 一起工作。
连接到开发板上
DHT22:红线接3V3(OUT),黑线接地,绿线接GPIOA15。
电路图如下所示:黑色圆圈表示DHT22。

DHT22接好后应该是这样的:

二、示例代码
GitHub链接:https://github.com/milkv-duo/duo-examples
dht22.c:
// Ref: https://github.com/technion/lol_dht22/blob/master/dht22.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <unistd.h>
#include <wiringx.h>
#define MAXTIMINGS 85
static int DHTPIN = 15;
static int dht22_dat[5] = {0, 0, 0, 0, 0};
static uint8_t sizecvt(const int read)
{
/* digitalRead() and friends from wiringpi are defined as returning a value
< 256. However, they are returned as int() types. This is a safety function */
if (read > 255 || read < 0)
{
printf("Invalid data from wiringPi library\n");
exit(EXIT_FAILURE);
}
return (uint8_t)read;
}
static int read_dht22_dat()
{
uint8_t laststate = HIGH;
uint8_t counter = 0;
uint8_t j = 0, i;
dht22_dat[0] = dht22_dat[1] = dht22_dat[2] = dht22_dat[3] = dht22_dat[4] = 0;
// pull pin down for 18 milliseconds
pinMode(DHTPIN, PINMODE_OUTPUT);
digitalWrite(DHTPIN, HIGH);
// delay(500);
delayMicroseconds(500000);
digitalWrite(DHTPIN, LOW);
// delay(20);
delayMicroseconds(20000);
// prepare to read the pin
pinMode(DHTPIN, PINMODE_INPUT);
// detect change and read data
for (i = 0; i < MAXTIMINGS; i++)
{
counter = 0;
while (sizecvt(digitalRead(DHTPIN)) == laststate)
{
counter++;
delayMicroseconds(2);
if (counter == 255)
{
break;
}
}
laststate = sizecvt(digitalRead(DHTPIN));
if (counter == 255)
break;
// ignore first 3 transitions
if ((i >= 4) && (i % 2 == 0))
{
// shove each bit into the storage bytes
dht22_dat[j / 8] <<= 1;
if (counter > 16)
dht22_dat[j / 8] |= 1;
j++;
}
}
// check we read 40 bits (8bit x 5 ) + verify checksum in the last byte
// print it out if data is good
if ((j >= 40) &&
(dht22_dat[4] == ((dht22_dat[0] + dht22_dat[1] + dht22_dat[2] + dht22_dat[3]) & 0xFF)))
{
float t, h;
h = (float)dht22_dat[0] * 256 + (float)dht22_dat[1];
h /= 10;
t = (float)(dht22_dat[2] & 0x7F) * 256 + (float)dht22_dat[3];
t /= 10.0;
if ((dht22_dat[2] & 0x80) != 0)
t *= -1;
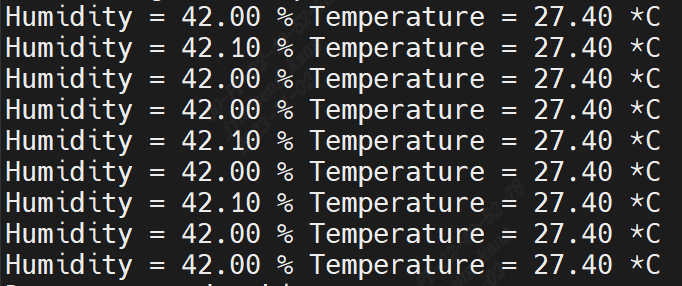
printf("Humidity = %.2f %% Temperature = %.2f *C \n", h, t);
return 1;
}
else
{
printf("Data not good, skip\n");
return 0;
}
}
int main()
{
// Duo: milkv_duo
// Duo256M: milkv_duo256m
// DuoS: milkv_duos
if (wiringXSetup("milkv_duo", NULL) == -1)
{
wiringXGC();
return -1;
}
if (wiringXValidGPIO(DHTPIN) != 0)
{
printf("Invalid GPIO %d\n", DHTPIN);
}
while (1)
{
read_dht22_dat();
delayMicroseconds(1500000);
}
return 0;
}
Makefile:
TARGET=dht22
ifeq (,$(TOOLCHAIN_PREFIX))
$(error TOOLCHAIN_PREFIX is not set)
endif
ifeq (,$(CFLAGS))
$(error CFLAGS is not set)
endif
ifeq (,$(LDFLAGS))
$(error LDFLAGS is not set)
endif
CC = $(TOOLCHAIN_PREFIX)gcc
CFLAGS += -I$(SYSROOT)/usr/include
LDFLAGS += -L$(SYSROOT)/lib
LDFLAGS += -L$(SYSROOT)/usr/lib
LDFLAGS += -lwiringx
SOURCE = $(wildcard *.c)
OBJS = $(patsubst %.c,%.o,$(SOURCE))
$(TARGET): $(OBJS)
$(CC) -o $@ $(OBJS) $(LDFLAGS)
%.o: %.c
$(CC) $(CFLAGS) -o $@ -c $<
.PHONY: clean
clean:
@rm *.o -rf
@rm $(OBJS) -rf
@rm $(TARGET)
三、准备开发环境
1、使用本地的Ubuntu系统,推荐 Ubuntu 20.04 LTS(也可以使用虚拟机中的Ubuntu系统、Windows中WSL安装的Ubuntu、基于Docker的Ubuntu系统)
2、安装编译依赖的工具:
sudo apt-get install wget git make
3、获取 Examples
git clone https://github.com/milkv-duo/duo-examples.git
4、加载编译环境
cd duo-examples
source envsetup.sh
5、第一次加载会自动下载所需的SDK包,大小为180M左右,下载完会自动解压到duo-examples下,解压后的目录名为duo-sdk,下次加载时检测到已存在该目录,就不会再次下载了。
*注: 如果因为网络原因无法完成SDK包的下载,请通过其他途径获取到duo-sdk.tar.gz包,手动解压到duo-examples目录下,重新source envsetup.sh。下载路径在envsetup.sh中能找到:https://github.com/milkv-duo/duo-app-sdk/releases/download/duo-app-sdk-v1.2.0/duo-sdk-v1.2.0.tar.gz 如下图所示。
 6、编译测试
6、编译测试
以hello-world为例,进入该例子目录直接执行make即可
cd hello-world
make
编译成功后将生成的helloworld可执行程序通过网口或者RNDIS网络等方式传送到Duo设备中,比如默认固件支持的RNDIS方式,Duo的IP为192.168.42.1,用户名是root,密码是milkv
scp helloworld [email protected]:/root/
发送成功后,在ssh或者串口登陆的终端中运行./helloworld,会打印Hello, World!
[root@milkv\]~# ./helloworld
Hello, World!
7、至此,我们的编译开发环境就可以正常使用了。
四、运行程序

接下来开始编译,进入该目录直接执行make即可
cd dht22
make it
make报错source一下即可。编译成功后得到dht22可执行程序。如下图所示。

然后把dht22上传到开发板root路径下,输入./dht22即可运行。运行成功截图如下:
DF9GMS 180°
一、硬件信息
duo开发板引脚
GitHub链接:https://github.com/milkv-duo/duo-files/blob/main/duo/hardware/duo-schematic-v1.2.pdf
DF9GMS 180°

由DFRobot 出品的DF9GMS微型舵机,该舵机采用高强度ABS透明外壳配以内部高精度尼龙齿轮组,加上精准的控制电路、高档轻量化空心杯电机使该微型舵机的重量只有9克,而输出力矩达到了惊人的1.6kg/cm。
技术规格:
工作电压:4.8V
转矩:1.6kg/cm(4.8V)
速度:0.14秒/60度(4.8V)
使用温度:-30~+60摄氏度
死区宽度:0.5毫秒
外形尺寸:23x12.2x29mm
重量:9g
组成结构及工作原理

连接图
-
硬件
-
1 x Arduino UNO控制板
-
1 x DF9GMS微型舵机
-
若干 杜邦线
-
灰色——GND、红色——VCC、黄色——信号线

-
连接到开发板上
DF9GMS:红线接VSYS,棕线接地,橙线接GPIO19。
电路图如下所示:紫色圆圈表示DF9GMS。
DF9GMS接好后应该是这样的:

二、示例代码
GitHub链接:https://github.com/milkv-duo/duo-examples
df9gms.c:
#include <stdio.h>
#include <unistd.h>
#include <wiringx.h>
/*
Duo
------------------------------------------
PWM operation at a fixed frequency clock of 100MHz, writing Period in units of nanoseconds.
DF9GMS 360-degree PWM Duty Cycle
------------------------------------------
0.4ms - 1.4ms CW deceleration
1.5ms Stop
1.6ms - 3ms CCW acceleration
*/
static int PWM_PIN = 4; // PWM5@GP4
int main()
{
long i;
// Duo: milkv_duo
// Duo256M: milkv_duo256m
// DuoS: milkv_duos
if(wiringXSetup("milkv_duo", NULL) == -1) {
wiringXGC();
return -1;
}
wiringXPWMSetPeriod(PWM_PIN, 20000000); // 20ms
wiringXPWMSetDuty(PWM_PIN, 1500000); // 1.5ms stop
wiringXPWMSetPolarity(PWM_PIN, 0); // 0-normal, 1-inversed
wiringXPWMEnable(PWM_PIN, 1); // 1-enable, 0-disable
delayMicroseconds(1000000); // 1s
for (i = 10000; i< 3000000; i += 10000) // 10 us
{
wiringXPWMSetDuty(PWM_PIN, i);
printf("Duty: %ld\n", i);
delayMicroseconds(50000); // 50ms
}
wiringXPWMSetDuty(PWM_PIN, 1500000); // 1.5ms stop
return 0;
}
Makefile:
TARGET=df9gms
ifeq (,$(TOOLCHAIN_PREFIX))
$(error TOOLCHAIN_PREFIX is not set)
endif
ifeq (,$(CFLAGS))
$(error CFLAGS is not set)
endif
ifeq (,$(LDFLAGS))
$(error LDFLAGS is not set)
endif
CC = $(TOOLCHAIN_PREFIX)gcc
CFLAGS += -I$(SYSROOT)/usr/include
LDFLAGS += -L$(SYSROOT)/lib
LDFLAGS += -L$(SYSROOT)/usr/lib
LDFLAGS += -lwiringx
SOURCE = $(wildcard *.c)
OBJS = $(patsubst %.c,%.o,$(SOURCE))
$(TARGET): $(OBJS)
$(CC) -o $@ $(OBJS) $(LDFLAGS)
%.o: %.c
$(CC) $(CFLAGS) -o $@ -c $<
.PHONY: clean
clean:
@rm *.o -rf
@rm $(OBJS) -rf
@rm $(TARGET)
三、准备开发环境
1、使用本地的Ubuntu系统,推荐 Ubuntu 20.04 LTS(也可以使用虚拟机中的Ubuntu系统、Windows中WSL安装的Ubuntu、基于Docker的Ubuntu系统)
2、安装编译依赖的工具:
sudo apt-get install wget git make
3、获取 Examples
git clone https://github.com/milkv-duo/duo-examples.git
4、加载编译环境
cd duo-examples
source envsetup.sh
5、第一次加载会自动下载所需的SDK包,大小为180M左右,下载完会自动解压到duo-examples下,解压后的目录名为duo-sdk,下次加载时检测到已存在该目录,就不会再次下载了。
*注: 如果因为网络原因无法完成SDK包的下载,请通过其他途径获取到duo-sdk.tar.gz包,手动解压到duo-examples目录下,重新source envsetup.sh。下载路径在envsetup.sh中能找到:https://github.com/milkv-duo/duo-app-sdk/releases/download/duo-app-sdk-v1.2.0/duo-sdk-v1.2.0.tar.gz 如下图所示。
6、编译测试
以hello-world为例,进入该例子目录直接执行make即可
cd hello-world
make
编译成功后将生成的helloworld可执行程序通过网口或者RNDIS网络等方式传送到Duo设备中,比如默认固件支持的RNDIS方式,Duo的IP为192.168.42.1,用户名是root,密码是milkv
scp helloworld [email protected]:/root/
发送成功后,在ssh或者串口登陆的终端中运行./helloworld,会打印Hello, World!
[root@milkv\]~# ./helloworld
Hello, World!
7、至此,我们的编译开发环境就可以正常使用了。
四、运行程序
如图所示:
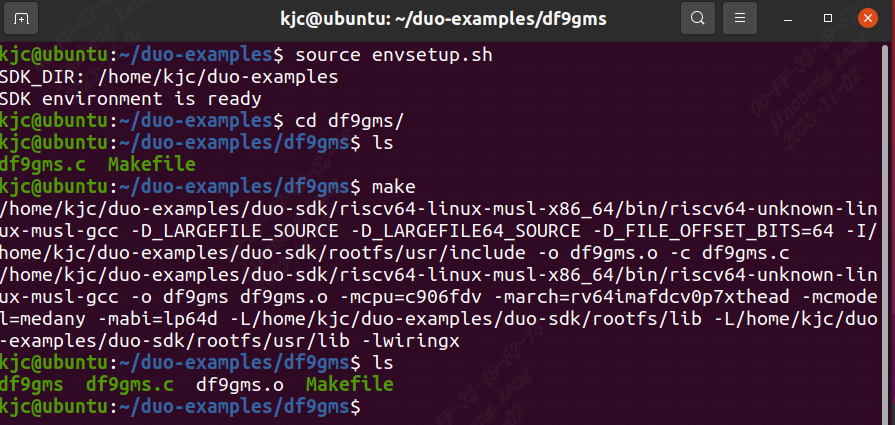
接下来开始编译,以df9gms为例,进入该例子目录直接执行make即可
cd df9gms
make
make报错source一下即可。编译成功后得到df9gms可执行程序。如下图所示。
然后把df9gms上传到开发板root路径下,输入./df9gms即可运行。运行成功截图如下:








