基于 Googlenet 的图像分类
1. 配置 Docker 开发环境
参考 这�里 配置好 Docker 开发环境后,再回到这里继续下一步。
若您使用已经配置好的 Docker 开发环境,请您启动 Docker 后务必按照 Docker 配置教程执行 source ./tpu-mlir/envsetup.sh 命令,否则后续步骤可能报错。
2. 在 Docker 中准备工作目录
创建并进入 googlenet 工作目录,注意是与 tpu-mlir 同级的目录
# mkdir googlenet && cd googlenet
获取原始模型
wget https://media.githubusercontent.com/media/onnx/models/main/validated/vision/classification/inception_and_googlenet/googlenet/model/googlenet-12.onnx
拷贝测试图片:
# cp -rf ${TPUC_ROOT}/regression/dataset/ILSVRC2012/ .
# cp -rf ${TPUC_ROOT}/regression/image/ .
这里的 ${TPUC_ROOT} 是环境变量,对应 tpu-mlir 目录,是在前面配置 Docker 开发环境中 source ./tpu-mlir/envsetup.sh 这一步加载的
创建并进入 work 工作目录,用于存放编译生成的 MLIR、cvimodel 等文件
# mkdir work && cd work
3. ONNX 模型转换
Duo 开发板搭载的是 CV1800B 芯片,该芯片支持 ONNX 系列 和 Caffe 模型,目前不支持 TFLite 模型。在量化数据类型方面,支持 BF16 格式的量化 和 INT8 格式的非对称量化
ONNX 模型转换成 MLIR
本例中的模型是 RGB 输入, mean 和 scale 分别为 123.675,116.28,103.53 和 0.0171,0.0175,0.0174,模型转换命令如下:
model_transform.py \
--model_name googlenet \
--model_def ../googlenet-12.onnx \
--test_input ../image/cat.jpg \
--input_shapes [[1,3,224,224]] \
--resize_dims 256,256 \
--mean 123.675,116.28,103.53 \
--scale 0.0171,0.0175,0.0174 \
--pixel_format rgb \
--test_result googlenet_top_outputs.npz \
--mlir googlenet.mlir
运行成功效果示例
转成 MLIR 模型后,会生成一个 googlenet.mlir 文件,该文件即为 MLIR 模型文件,还会生成一个 googlenet_in_f32.npz 文件和一个 googlenet_top_outputs.npz 文件,是后续转模型的输入文件

MLIR 转 BF16 模型
将 MLIR 模型转换为 BF16 模型的命令如下:
model_deploy.py \
--mlir googlenet.mlir \
--quantize BF16 \
--chip cv180x \
--test_input googlenet_in_f32.npz \
--test_reference googlenet_top_outputs.npz \
--model googlenet_bf16.cvimodel
如果您使用的开发板不是 Duo ,请将上述命令中第 4 行 --chip cv180x 更换为对应的芯片型号。
使用 Duo 256M/Duo S 时应更改为 --chip cv181x。
运行成功效果示例
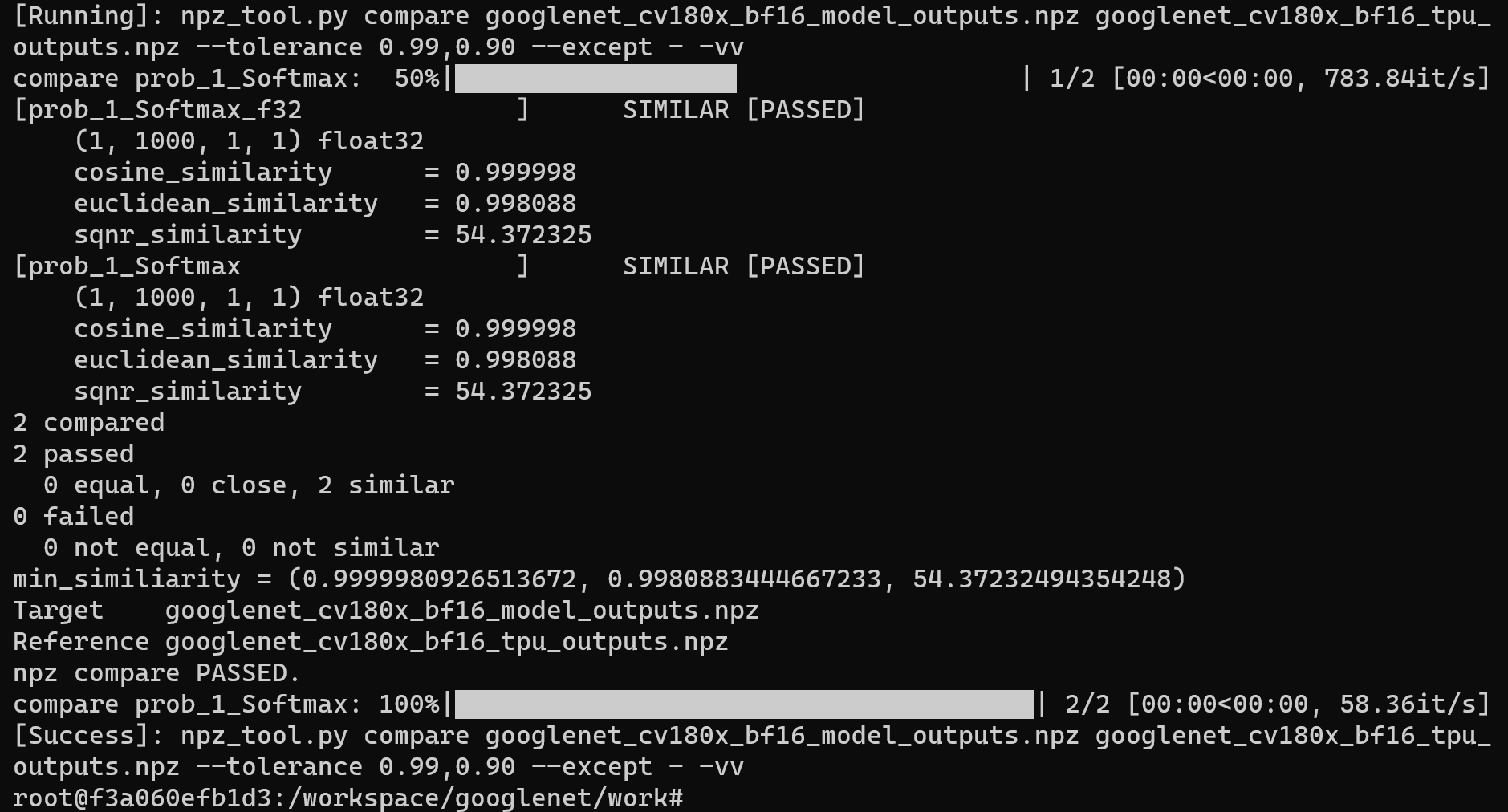
编译完成后,会生成 googlenet_bf16.cvimodel 文件
MLIR 转 INT8 模型
生成量化需要的校准表
运行 run_calibration.py 得到校准表,输入数据的数量根据情况准备 100~1000 张左右。 这里用现有的 100 张来自 ILSVRC2012 的图片举例,执行 calibration 命令:
run_calibration.py googlenet.mlir \
--dataset ../ILSVRC2012 \
--input_num 100 \
-o googlenet_cali_table
运行成功效果示�例
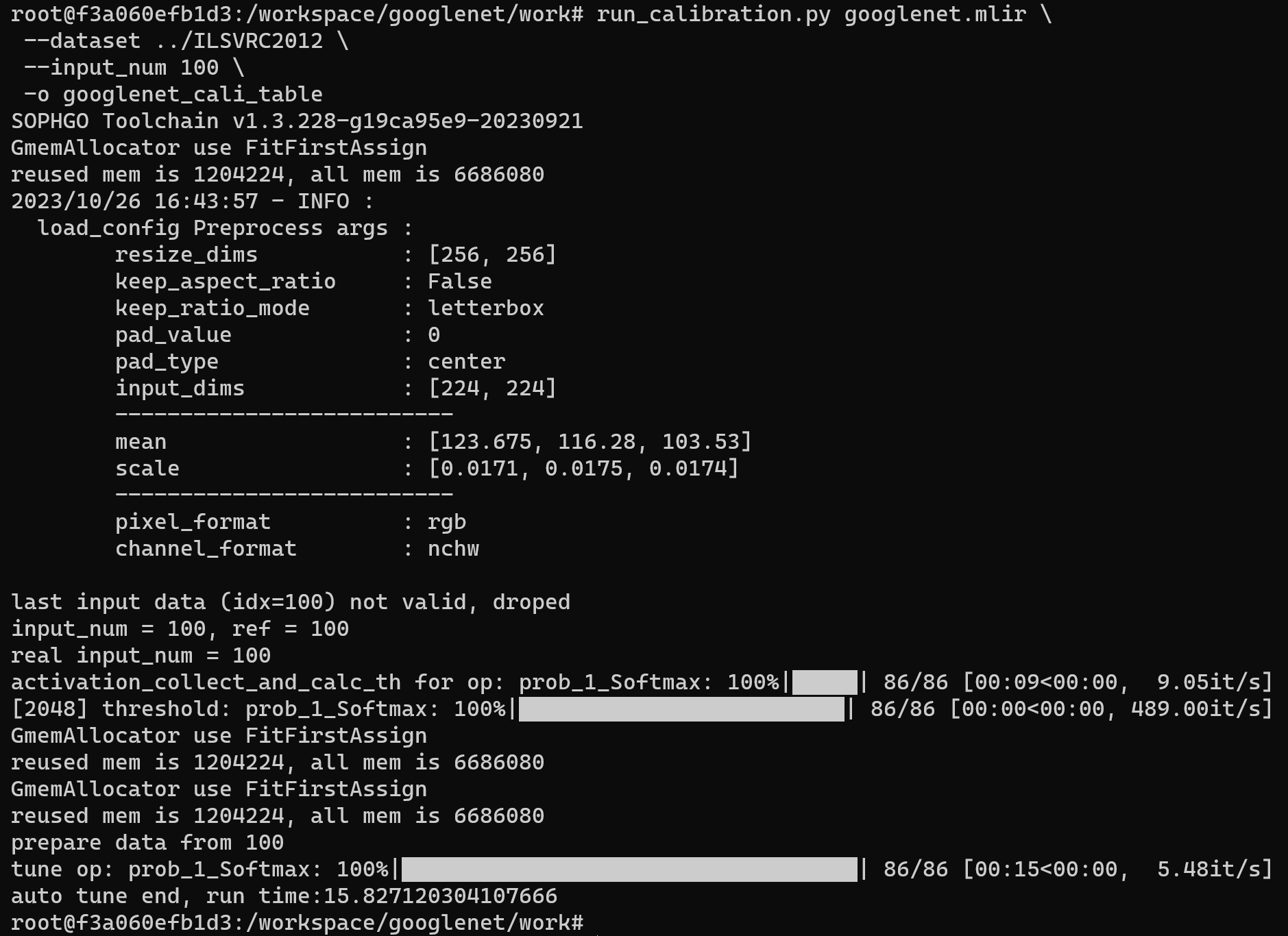
运行完成后会生成名为 googlenet_cali_table 的文件, 该文件用于后续编译 INT8 模型的输入文件
MLIR 量化成 INT8 非对称 cvimodel
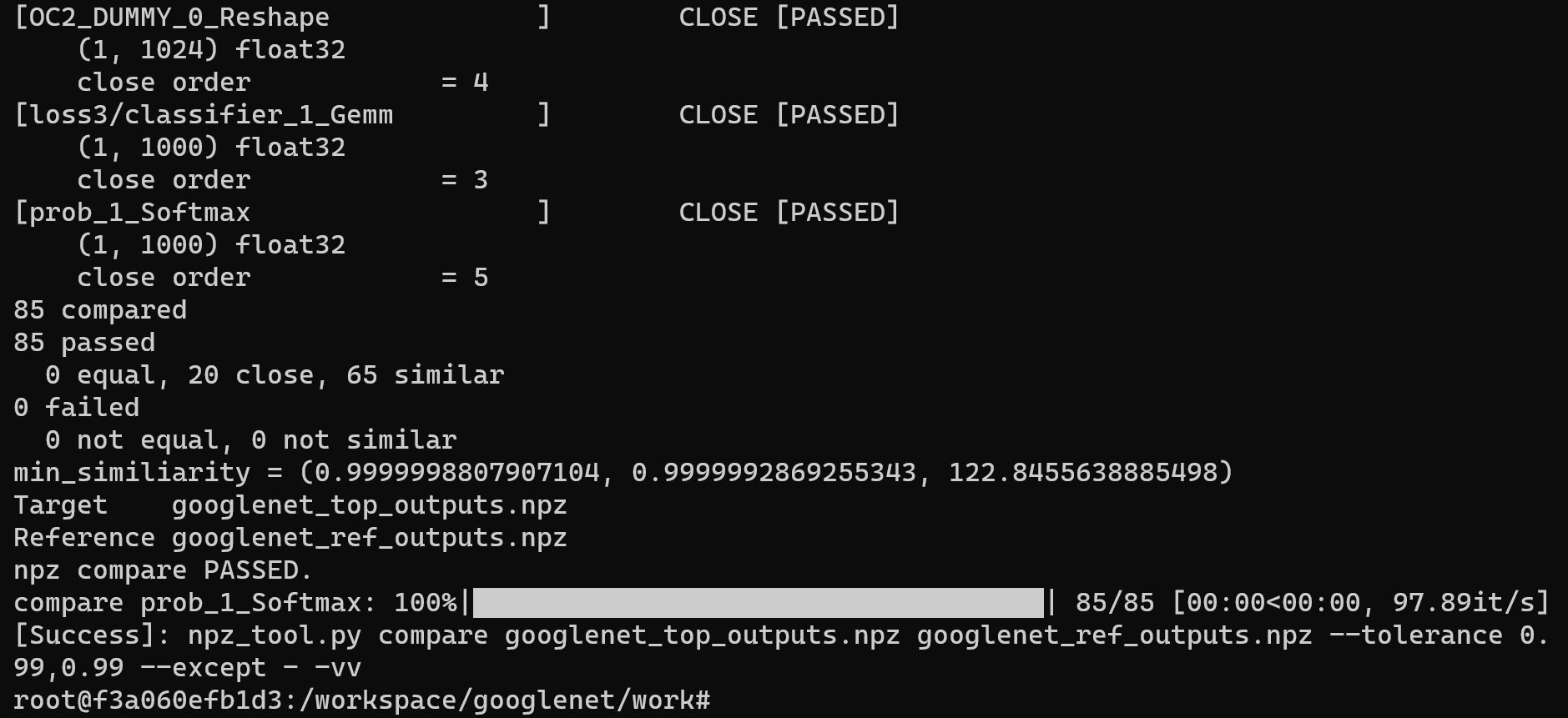
将 MLIR 模型转换为 INT8 模型的命令如下:
model_deploy.py \
--mlir googlenet.mlir \
--quantize INT8 \
--calibration_table googlenet_cali_table \
--chip cv180x \
--test_input ../image/cat.jpg \
--test_reference googlenet_top_outputs.npz \
--compare_all \
--fuse_preprocess \
--model googlenet_int8_fuse.cvimodel
如果您使用的开发板不是 Duo ,请将上述命令中第 5 行 --chip cv180x 更换为对应的芯片型号。
使用 Duo 256M/Duo S 时应更改为 --chip cv181x。
运行成功效果示例
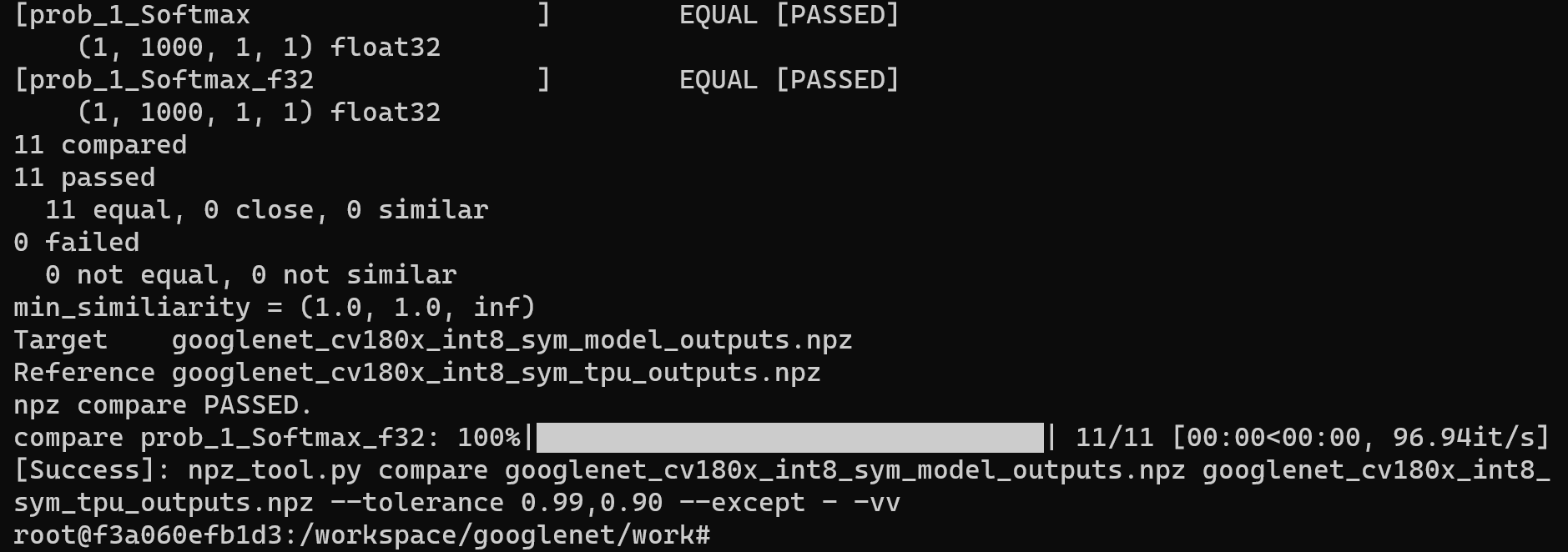
编译完成后, 会生成名为 googlenet_int8_fuse.cvimodel 的文件
4. 在 Duo 开发板上进行验证
连接 Duo 开发板
根据前面的教程完成 Duo 开发板与电脑的连接,并使用 mobaxterm 或 Xshell 等工具开启终端操作 Duo 开发板
获取 tpu-sdk
在 Docker 终端下切换到 /workspace 目录
cd /workspace
下载 tpu-sdk,如果您使用的是 Duo ,则执行
git clone https://github.com/milkv-duo/tpu-sdk-cv180x.git
mv ./tpu-sdk-cv180x ./tpu-sdk
如果您使用的是 Duo 256M/Duo S ,则执行
git clone https://github.com/milkv-duo/tpu-sdk-sg200x.git
mv ./tpu-sdk-sg200x ./tpu-sdk
将开发工具包和模型文件拷贝到 Duo 开发板上
在 duo 开发板的终端中,新建文件目录 /mnt/tpu/
# mkdir -p /mnt/tpu && cd /mnt/tpu
在 Docker 的终端中,将 tpu-sdk 和模型文件拷贝到 Duo 开发板上
# scp -r /workspace/tpu-sdk [email protected]:/mnt/tpu/
# scp /workspace/googlenet/work/googlenet_bf16.cvimodel [email protected]:/mnt/tpu/tpu-sdk/
# scp /workspace/googlenet/work/googlenet_int8_fuse.cvimodel [email protected]:/mnt/tpu/tpu-sdk/
设置环境变量
在 Duo 开发板的终端中,进行环境变量的设置
# cd /mnt/tpu/tpu-sdk
# source ./envs_tpu_sdk.sh
进行图像分类测试
在 Duo 开发板上,对该图像进行分类

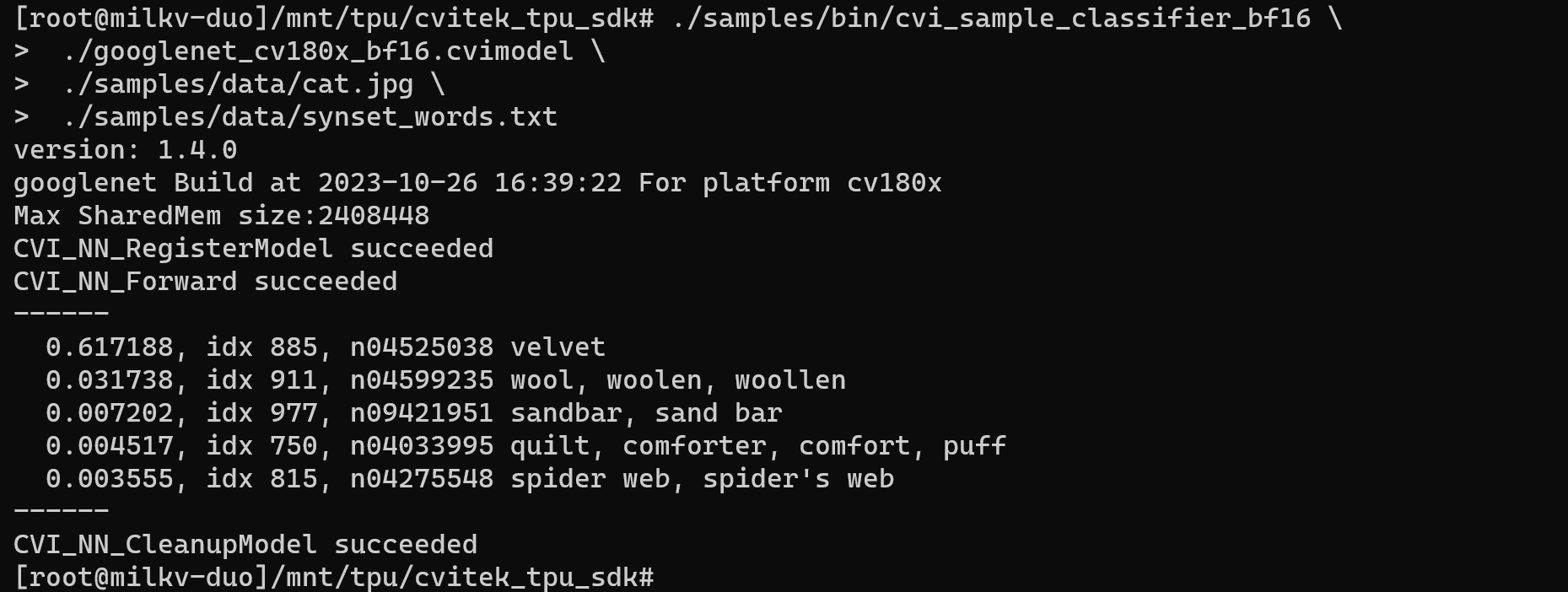
使用 googlenet_bf16.cvimodel 模型进行图像分类
./samples/bin/cvi_sample_classifier_bf16 \
./googlenet_bf16.cvimodel \
./samples/data/cat.jpg \
./samples/data/synset_words.txt
分类成功结果示例
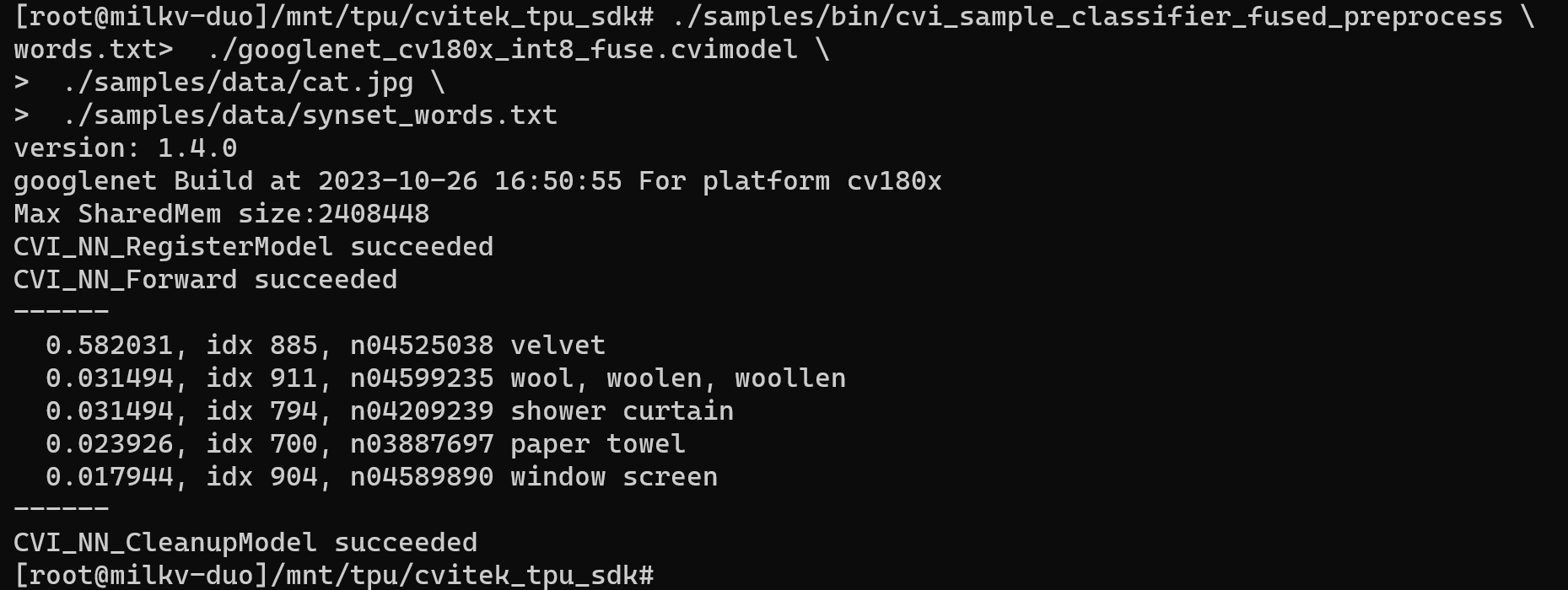
使用 googlenet_int8_fuse.cvimodel 模型进行图像分类
./samples/bin/cvi_sample_classifier_fused_preprocess \
./googlenet_int8_fuse.cvimodel \
./samples/data/cat.jpg \
./samples/data/synset_words.txt
分类成功结果示例