8051 核
简介
Duo 使用的 CPU 中包含一个 8051 核,8051 子系统位于由 RTC 独立供电的模块中。 该子系统配置有 8051、I2C/UART/SPI NOR/SD 控制器、定时器/WDT、中断管理和 Mailbox IP。系统软件可以使用 8051 管理唤醒条件并在睡眠模式下唤醒系统,并通过外设控制器与外部设备通信。
快速开始
8051核编译指南
源码地址: github。
执行:
git clone https://github.com/milkv-duo/duo-8051.git
cd duo-8051/sdcc/mars/project/base_project
make clean && make
编译成功后在 sdcc/mars/project/base_project/output 中可以找到编译好的固件 mars_mcu_fw.bin 。
加载固件方法
首先下载固件及工具,并将压缩包解压:firmware.zip。
一、在8051-SRAM中加载固件:
-
将
8051_up、mars_mcu_fw.bin、blink.sh拷入/mnt/data,并赋予执行和读取权限。 -
执行
8051_up自动更新固件并启动8051核。 -
执行
blink.sh,该脚本会向8051核心发送信息,使蓝色LED闪烁(在执行该脚本前请确认 /mnt/system/blink.sh 已经被移除)。
该种方法运行时8051内核固件不能超过8KB,超过可能造成不运行。
二、在DDR内存中加载固件:
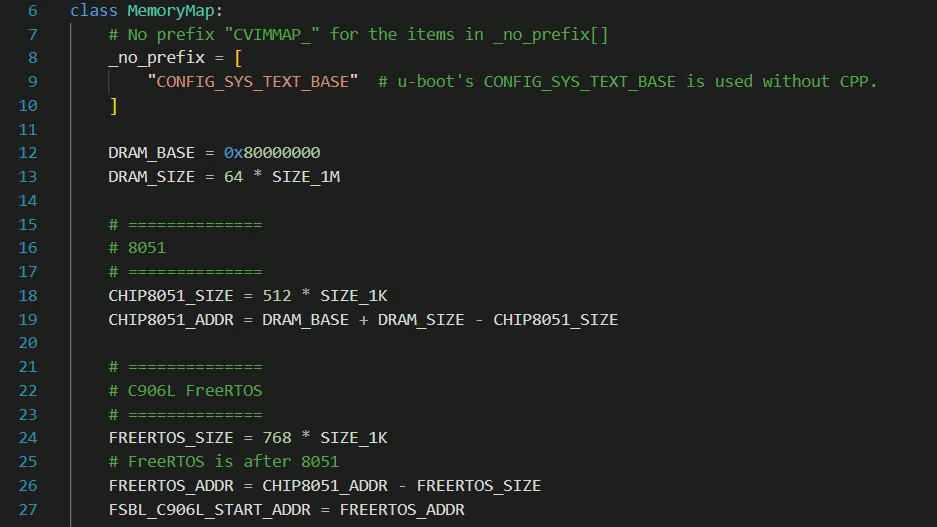
1.更改SDK中内存分配,修改 build/boards/[chip model]/[board config]/memmap.py 。
在MemoryMap中添加以下内容:
# ==============
# 8051
# ==============
CHIP8051_SIZE = 512 * SIZE_1K
CHIP8051_ADDR = DRAM_BASE + DRAM_SIZE - CHIP8051_SIZE
修改以下内容:
# ==============
# C906L FreeRTOS
# ==============
FREERTOS_SIZE = 768 * SIZE_1K
# FreeRTOS is after 8051
FREERTOS_ADDR = CHIP8051_ADDR - FREERTOS_SIZE
FSBL_C906L_START_ADDR = FREERTOS_ADDR
-
重新编译固件并烧录到开发板。
-
将
8051_up、mars_mcu_fw.bin、blink.sh、8051_boot_cfg.ini拷入/mnt/data,并赋予执行和读取权限。 -
执行
8051_up自动更新固件并启动8051核。 -
执行
blink.sh,该脚本会向8051核心发送信息,使蓝色LED闪烁(在执行该脚本前请确认 /mnt/system/blink.sh 已经被移除)。
若想自定义8051存放固件的DDR内存大小,请修改:
CHIP8051_SIZE = 512 * SIZE_1K
512为自定义大小,并修改8051_boot_cfg.ini中地址为自定义地址。
Duo地址计算公式为 "2147483648+64*1048576-[自定义大小]*1024" 。
Duo-256M地址计算公式为 "2147483648+256*1048576-[自定义大小]*1024" 。
(��注意地址填写时必须转换成16进制地址0xXXXXXXX。)
8051 SDCC
简介
SDCC 是一个目标CPU为8051的交叉编译器,在Duo中用于编译8051核相关代码。
8051片上资源
外设资源
8051 IP自带外设
-
3个16bit Timer。
-
1个uart,复用
PWR_UART_RX/PWR_UART_TX。
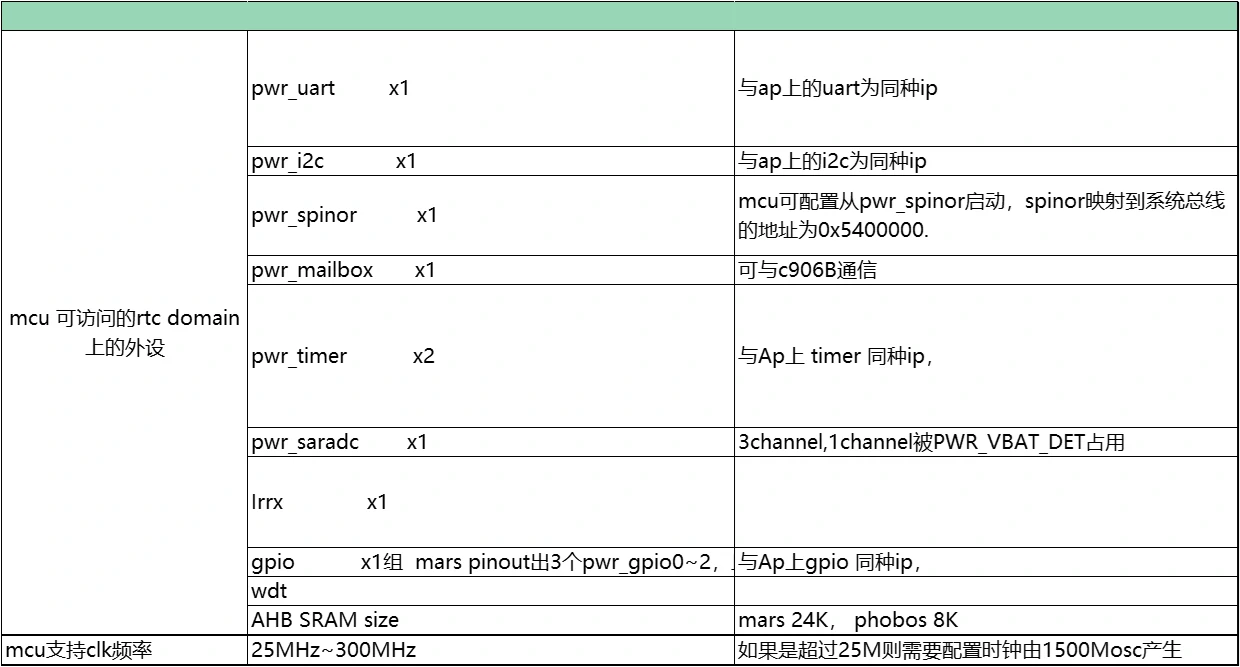
rtc domain外设
8051一般使用在低功耗场景,rtc domain 在 poweroff/suspend 时候不会掉电, 即为 no die domain ,所以8051大部分情况使用的外设都在 rtc domain 上。rtc domain 的外设表有如下:
AP片上外设
8051在AP不掉电的情况下可访问 0x0 ~ 0xFFFFFFFF ,理论上AP侧的外设都可以访问,但是对应外设的中断信号是否能传到8051,需要查看 aptortc 中断表。
中断控制器
硬件结构
8051的中断控制分为三部分:
-
8051片上中断。
-
rtc上的外设中断信号。
-
AP侧中断。
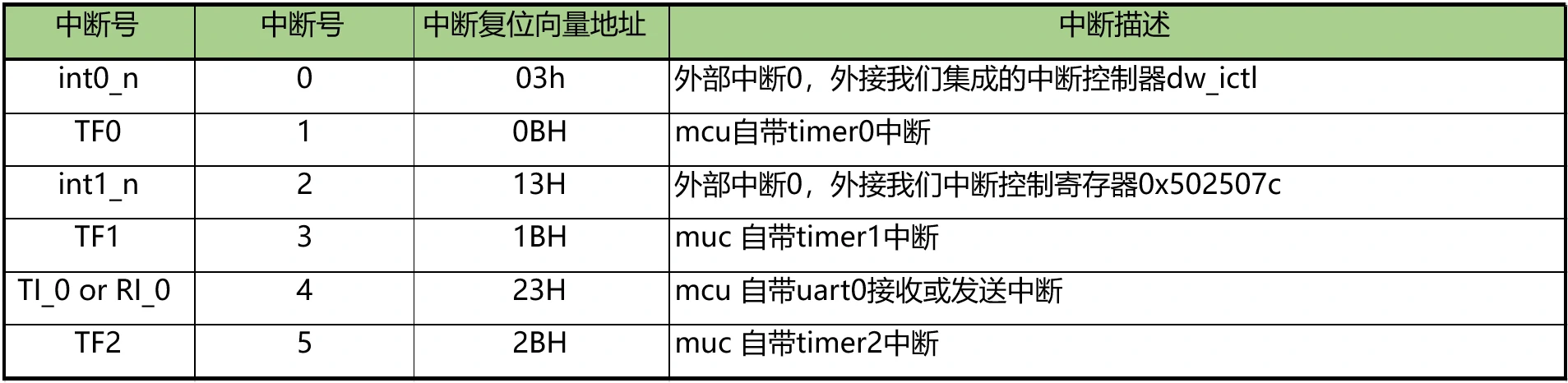
8051 IP定义的中断号和支持的中断类型,使用到的如下表所示:
rtc上的外设中断信号,可以通过 外部中断0 和 外部中断1 打包接入8051,可以理解为共用 int0_n , int1_n 中断线。如下图所示,其中 irq_ap2rtc[1:0] 处理AP上的中断事件。
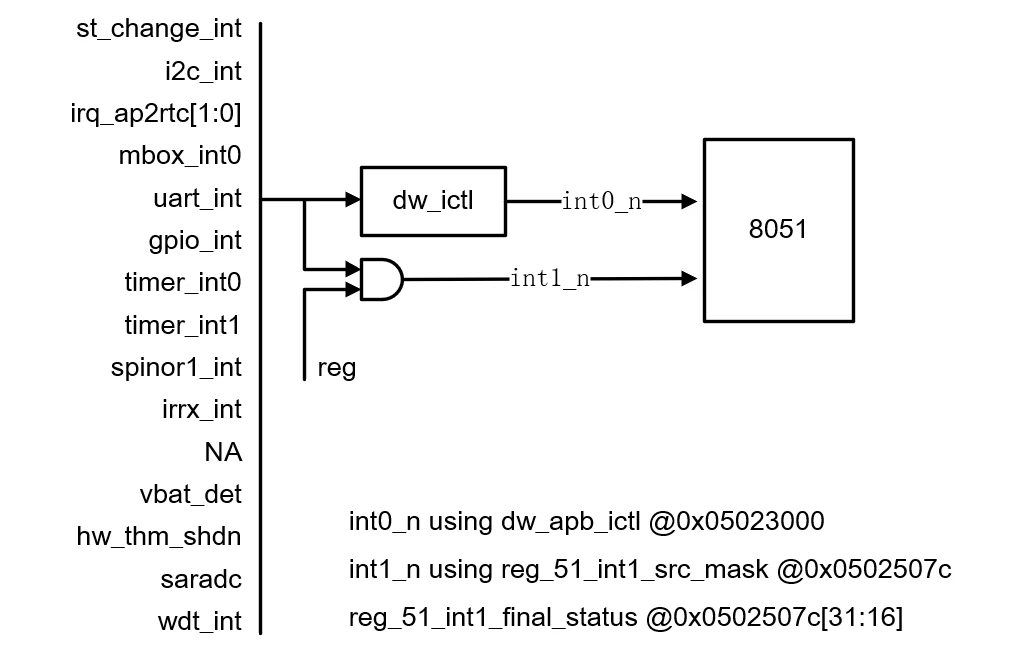
AP侧的中断事件通过 0x3000250 , 0x3000254 作或逻辑运算,打包AP侧的中断传输至 irq_ap2rtc[0] , 通过 0x3000260 , 0x3000264 打包ap侧中断事件传输到传输至 irq_ap2rtc[1]。
AP侧中断事件enable和查看status请查阅《reg_top_misc.xlsx》, 支持的中断类型和对应ap中断中断编号请查阅 《cv180x_interrupt.xlsx》中sheet “toptortc”。
中断配置流程
-
配置IP的中断事件并使能对应中断。
-
0x3000248 = 0x01使能 rtc2ap 总线转换。 -
查看对应中断号enable
rtcsys_ap2rtc_irq0_sigen0/rtcsys_ap2rtc_irq0_sigen1或rtcsys_ap2rtc_irq1_sigen0/rtcsys_ap2rtc_irq1_sigen1对应的bit。 -
enable
irq_ap2rtc[0]或 enableirq_ap2rtc[1]。 -
enable
int0_n或 enableint1_n。 -
中断响应进入外部中断处理函数后,查看 dw_ictl 或reg
0x502507cstatus,是否是由于irq_ap2rtc[0]或irq_ap2rtc[1]事件响应,如果是,再往下查看rtcsys_ap2rtc_irq0_status0/crtcsys_ap2rtc_irq0_status1或rtcsys_ap2rtc_irq1_status0/rtcsys_ap2rtc_irq1_status1查看是响应的AP中断事件的��哪一个。
中断控制实例:
#if TEST_APTORTC_ICTL
static int __xdata aptortc_count = 0;
int test_aptortc_gpioa_isr(char irqn, int *priv)
{
write_robot(0x0302004c, 0x8000);
printf("gpio0 interrupt\n");
aptortc_count++;
}
void test_aptortc_irq()
{
printf("test aptortc irq\n");
write_robot(0x03020004, 0x100c0020); //设置gpioA gpio15为输出
write_robot(0x03001908, 0x44); //切换pinmux为上拉
write_robot(0x03020030, 0xa000); //使能中断
write_robot(0x03020038, 0x8000); //设置边缘触发
ap2rtc_irq_init();
ap2rtc_request_irq(17, test_aptortc_gpioa_isr, NULL);
ap2rtc_irq_unmask(17);
dw_ictl_unmask(IRQ_AP2RTC0_INTR);
irq_enable();
printf("REG_51_INT1_SRC_MASK: 0x%081x\n", read_robot(REG_51_INT1_SRC_MASK));
EX0 = 1;
EX1 = 1;
EA = 1;
while(aptortc_count == 0)
printf("gpioA irq 0x3020040 = %x, aptortc_irq status = %x\n",read_robot(0x3020040),read_robot(0x3000258));
printf("aptortc_count = %d\n",aptortc_count);
irq_disable();
}
#endif
8051地址映射和启动方式
8051核地址空间分为以下三部分:
-
Program memory:Internal rom(64K)+External rom(64K~4M by code banking)。 -
Data memory:Internal ram(256byte)+External ram(64K~4G)。 -
Special register(128byte)。
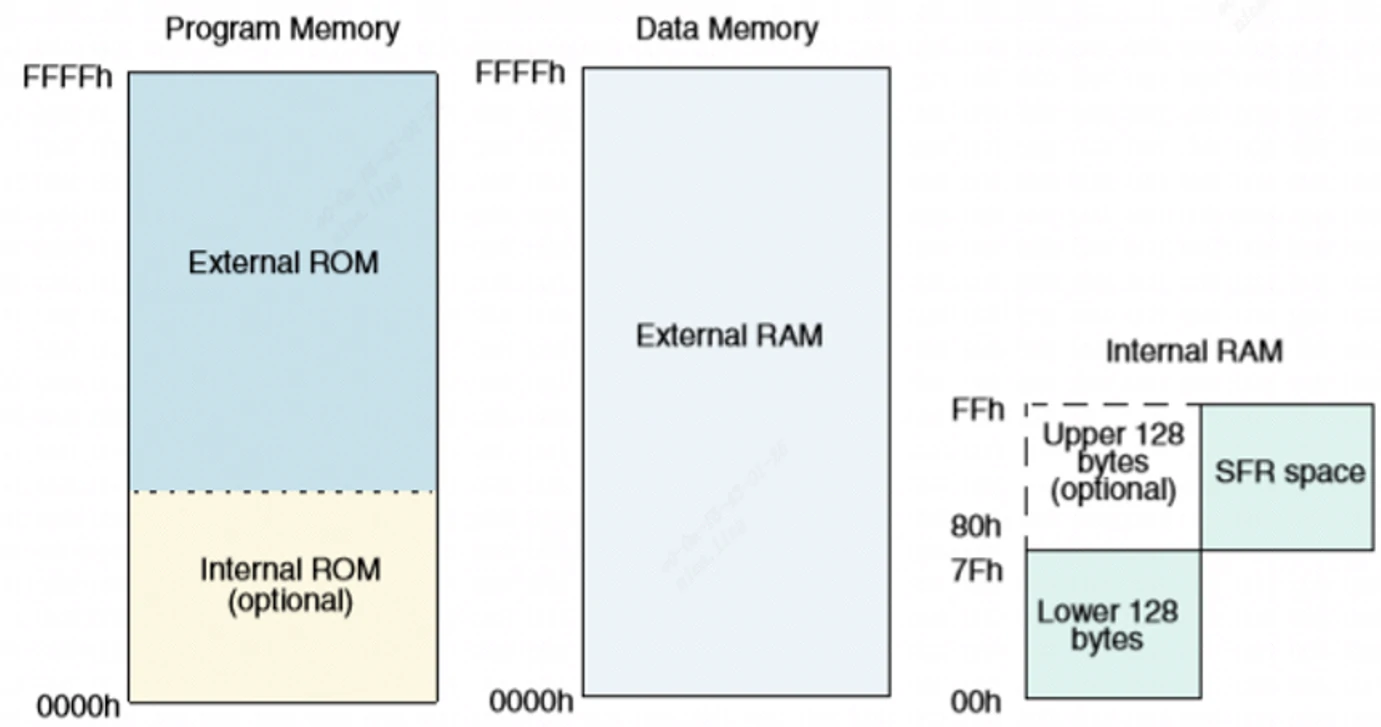
8051本身不自带externel rom、externel ram,这里表述的是总线可寻址能力,在系统中通过 0x5025020 和 0x5025024 或 sfr(0xfd,0xfc) 把 externel rom , externel rom 映射到芯片上的存储器如AHB SRAM, TPU SRAM, DDR,SPINOR地址空间。
8051 IP负责地址映射的模块
-
u_mcu_8051_iram。 -
u_mcu_8051_sfr_wp(负责SFR到AHB总线的转换)。 -
u_mcu_8051_xdata_wp(负责映射externel rom和externel ram)。
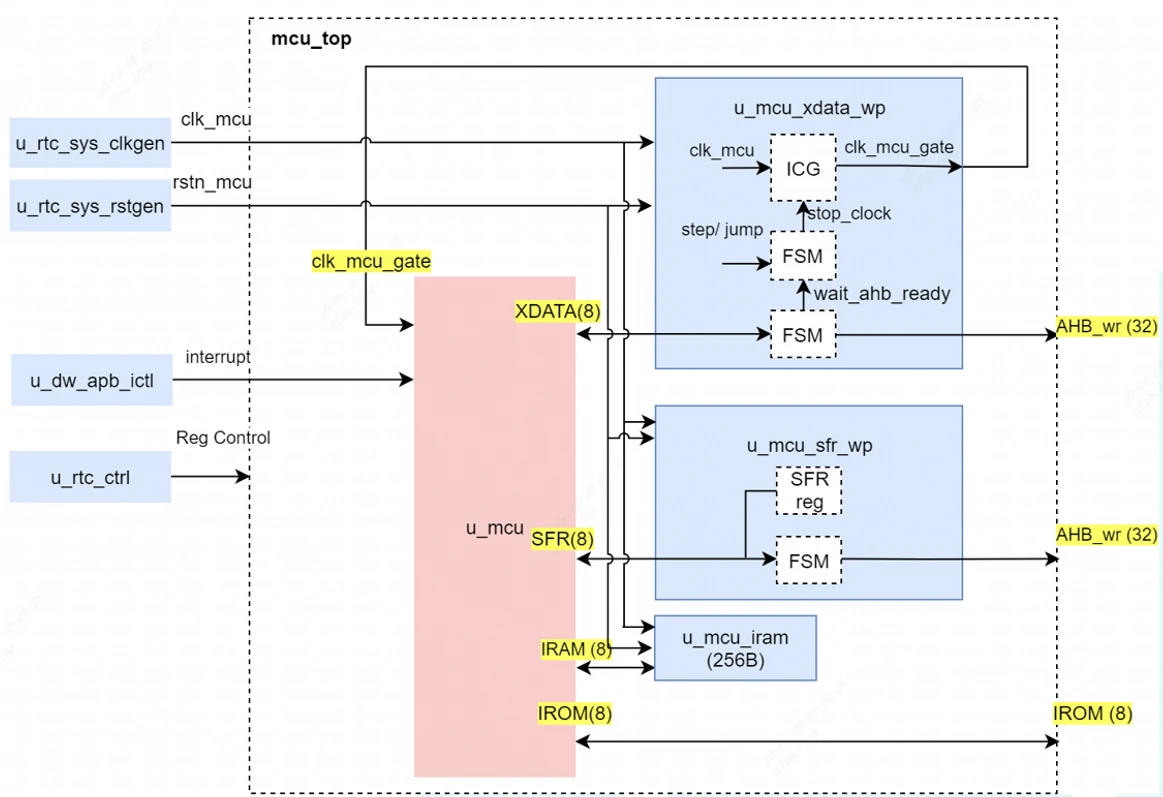
SFR到AHB总线的转换主要用来读写寄存器,在代码中 robot_read , robot_write 就是通过此接口。
8051地址线位宽16bit,数据线位宽8bit, XDATA 接口把 externel rom 和 externel ram 映射到32bit的存储空间如AHB SRAM、TPU SRAM,DDR和SPINOR。
关于地址映射和启动方式的注意事项
-
cv181x和cv180x需要配置
0x5025020中reg_51_rom_addr_def = 1。 -
8051 irom默认只能映射到AHB SRAM,可修改
0x5025024中reg_51irom_ioffset[4:0]配置首地址在AHB SRAM上的偏移量。首地址为0x5200000 + reg_51irom_ioffset[4:0] * 2KB。只有在reg_51_mem_ea_n = 1(配置externel rom不存在)时,mcu才会从irom启动,超过irom地址则去externel rom取指。reg_51_mem_ea_n = 0时则从externel rom启动,不使用irom。 -
externel rom首地址可以映射到AHB SRAM,TPU SRAM, DDR和SPINOR地址空间, 可配置
0x5025020的reg_51xdata_ioffset0[20:0]确定映射地址,externel rom的首地址为在reg_51xdata_ioffset0[20:0] * 2KB。 -
Externel ram的首地址可以映射到AHB SRAM,TPU SRAM,DDR,可配置
reg_51xdata_doffset0[20:0]或SFR(0xfd, 0xfc)。 -
如果配置
reg_51xdata_doffset0[20:0]此时externel ram的首地址为reg_51xdata_doffset0[20:0] * 2KB,此时必须设置 sfr0xfc = 0,0xfd = 0。reg_51xdata_doffset0[20:0]和SFR同时配置地址会是两者之和的叠加效果。 -
reg_51xdata_doffset0[20:0] = 0,配置SFR{0xfd,0xfc},则externel ram的首地址为SFR{0xfd,0xfc} * 64KB。
由于大部分情况8051是应用在低功耗场景,所以启动方式绝大多是program memory和data memory都映射到AHB SRAM。
修改external rom和external ram的划分
修改SDCC代码目录 sdcc/mars/project/base_project 下 MakeFile :
# ------------------------------------------------------
# Memory Layout
# PRG Size = 4K Bytes
CODE_SIZE = --code-loc 0x0000 --code-size 0x1F00
# INT-MEM Size = 256 Bytes
#IRAM_SIZE = --idata-loc 0x0000 --iram-size 256
# EXT-MEM Size = 32K Bytes
XRAM_SIZE = --xram-loc 0x1900 --xram-size 0x400
# ------------------------------------------------------
# MCS51 Options
修改 CODE_SIZE , XRAM_SIZE 以变更external rom和external ram的大小。
AHB SRAM寄存器大小8KB,在使用AHB SRAM作为external rom时注意内存分配不要大于8KB。
SFR 寄存器
SFR特殊功能寄存器也称专用寄存器,位于80H~FFH。SFR寄存器分为两类,一类是8051自带的SFR寄存器,另一类是扩展的SFR寄存器,完整的SFR寄存器可查阅 d8051_db.pdf 。
关于更多8051基础知识的补充请查阅网址 link 和IP手册 d8051_db.pdf 。
robot_write 和 robot_read 的实现
下图是实现 robot_write 和 robot_read 的相关SFR寄存器:
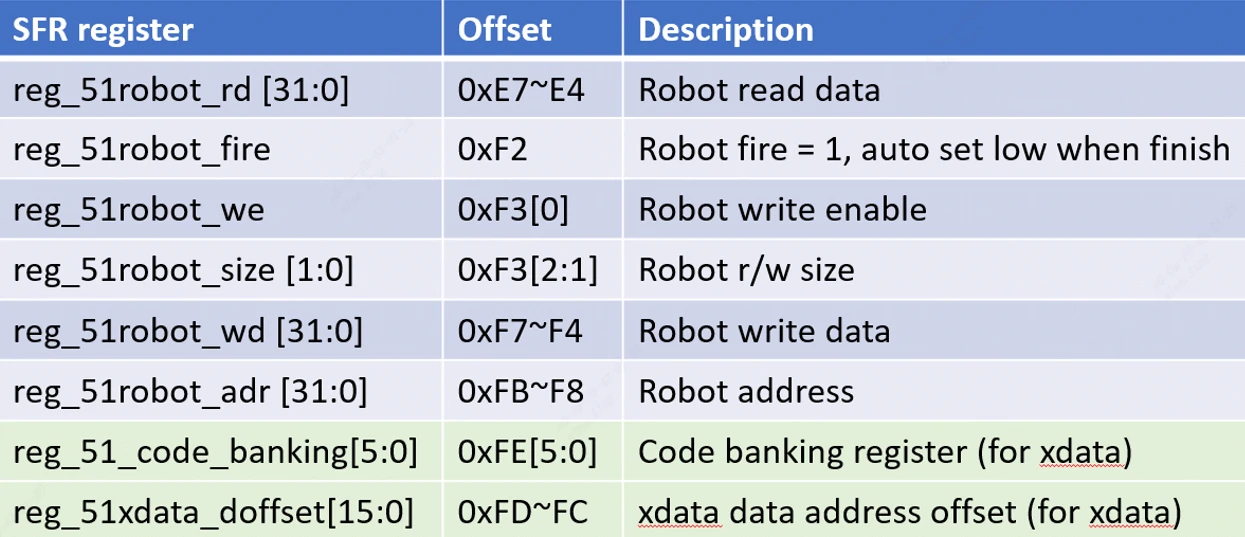
robot_write :
-
设置
reg_51robot_size、reg_51robot_adr、reg_51robot_wd、reg_51robot_we = 1。 -
写入过程中
reg_51robot_fire被置1,轮询该寄存器直到reg_51robot_fire == 0。
robot_read :
-
设置
reg_51robot_size、reg_51robot_adr、reg_51robot_we = 0。 -
读取过程中
reg_51robot_fire被置1,轮询该寄存器直到reg_51robot_fire == 0。 -
从
reg_51robot_rd读取数据。
固件加载工具 8051_UP
该工具用于将bin固件加载到内存并启动8051核。
源码地址: github。
编译方法
执行:
git clone https://github.com/milkv-duo/duo-examples.git
git clone https://github.com/milkv-duo/duo-8051.git
cp -r ./duo-8051/tools/8051_up ./duo-examples
cd ./duo-examples/8051_up
source ../envsetup.sh
make
编译成功后在 duo-examples/8051_up 目录下生成可执行文件 8051_up 。
编译好的软件可以在 firmware.zip 中找到,编译方法请参考 duo-examples 中的Demo。





