简介
Duo 系列开发板默认的 SDK 是基于 buildroot 构建的,用来生成 Duo 的固件,目前 SDK 有 V1 和 V2 两个版本。
- V1 版本 SDK 只支持 RISCV 核。(建议 Duo 64M 使用该版本)
- V2 版本 SDK 既支持 RISCV 核,也支持 ARM 核。(建议 Duo256M 和 DuoS 使用该版本)
建议 Duo 64M 选用 V1 版本的 SDK,主要是由于其内存较小,V2 版本的 SDK 中相关的 AI 应用目前还无法在 Duo 64M 中正常运行。
Buildroot SDK V1
SDK 主要包含如下几个部分:
- u-boot: 2021.10
- linux kernel: 5.10.4
- buildroot: 2021.05
- opensbi: 89182b2
源码地址: https://github.com/milkv-duo/duo-buildroot-sdk
SDK目录结构:
├── build 编译目录,存放编译脚本以及各board差异化配置
├── build.sh Milk-V Duo 一键编译脚本
├── buildroot-2021.05 buildroot 开源工具
├── freertos freertos 系统
├── fsbl fsbl启动固件,prebuilt 形式存在
├── install 执行一次完整编译后,临时存放各 image 路径
├── isp_tuning 图像效果调试参数存放路径
├── linux_5.10 开源 linux 内核
├── middleware 算能多媒体框架,包含 so 与 ko
├── device 存放 Milk-V Duo 相关配置及脚本文件的目录
├── opensbi 开源 opensbi 库
├── out Milk-V Duo 最终生成的镜像所在目录
├── ramdisk 存放最小文件系统的 prebuilt 目录
└── u-boot-2021.10 开源 uboot 代码
Buildroot SDK V2
SDK 主要包含如下几个部分:
- u-boot: 2021.10
- linux kernel: 5.10.4
- buildroot: 2025.02
- opensbi: 89182b2
源码地址: https://github.com/milkv-duo/duo-buildroot-sdk-v2
稳定分支: main
SDK目录结构:
├── build 编译目录,存放编译脚本以及各board差异化配置
├── build.sh Milk-V Duo 一键编译脚本
├── buildroot buildroot 开源工具
├── cvi_mpi 算能多媒体框架
├── device 存放 Milk-V Duo 相关配置及脚本文件的目录
├── freertos freertos 系统
├── fsbl fsbl启动固件,prebuilt 形式存在
├── install 执行一次完整编译后,临时存放各 image 路径
├── isp_tuning 图像效果调试参数存放路径
├── linux_5.10 开源 linux 内核
├── osdrv 一些外设驱动源码
├── opensbi 开源 opensbi 库
├── out Milk-V Duo 最终生成的镜像所在目录
├── tdl_sdk 算能深度学习算法 SDK
└── u-boot-2021.10 开源 uboot 代码
编译镜像
准备编译环境,使用本地的 Ubuntu 系统,官方支持的编译环境为 Ubuntu Jammy 22.04.x amd64。
如果您使用的是其他的 Linux 发行版,我们强烈建议您使用 Docker 环境来编译,以降低编译出错的概率。
以下分别介绍两种环境下的编译方法。
另外,V1 版本和 V2 版本 SDK 的编译方法基本一致,下面以 V2 版本 SDK 为例,介绍 SDK 的编译步骤。
一、使用 Ubuntu 22.04 编译
安装编译依赖的工具包
sudo apt install -y pkg-config build-essential ninja-build automake autoconf libtool wget curl git gcc libssl-dev bc slib squashfs-tools android-sdk-libsparse-utils jq python3-distutils scons parallel tree python3-dev python3-pip device-tree-compiler ssh cpio fakeroot libncurses5 flex bison libncurses5-dev genext2fs rsync unzip dosfstools mtools tcl openssh-client cmake expect python-is-python3
对于 duo-buildroot-sdk-v2,还需要安装以下工具包:
sudo pip install jinja2
获取 SDK
git clone https://github.com/milkv-duo/duo-buildroot-sdk-v2.git --depth=1
在编译过程中,Buildroot 会自动下载一些源码包。SDK V1 中已经集成了部分常用源码包,可以直接编译。SDK V2 中,为了避免由于网络原因导致下载失败,可以提前下载 dl.tar 包并解压到 buildroot 目录:
wget https://github.com/milkv-duo/duo-buildroot-sdk-v2/releases/download/dl/dl.tar
tar xvf ./dl.tar -C ./duo-buildroot-sdk-v2/buildroot/
解压后 duo-buildroot-sdk-v2 的 buildroot 中 dl 目录结构如下:
└── buildroot
└── dl
├── acl
├── alsa-lib
├── alsa-utils
├── attr
├── ...
1、一键编译
执行一键编译脚本 build.sh:
cd duo-buildroot-sdk-v2/
./build.sh
会看到编译脚本的使用方法提示:
$ ./build.sh
Usage:
./build.sh - Show this menu
./build.sh lunch - Select a board to build
./build.sh [board] - Build [board] directly, supported boards as follows:
milkv-duo-musl-riscv64-sd
milkv-duo256m-glibc-arm64-sd
milkv-duo256m-musl-riscv64-sd
milkv-duos-glibc-arm64-emmc
milkv-duos-glibc-arm64-sd
milkv-duos-musl-riscv64-emmc
milkv-duos-musl-riscv64-sd
最下边列出的是当前支持的目标版本列表。
如提示中所示,有两种方法来编译目录版本。
第一种方法是执行 ./build.sh lunch 调出交互菜单,选择要编译的版本序号,回车:
$ ./build.sh lunch
Select a target to build:
1. milkv-duo-musl-riscv64-sd
2. milkv-duo256m-glibc-arm64-sd
3. milkv-duo256m-musl-riscv64-sd
4. milkv-duos-glibc-arm64-emmc
5. milkv-duos-glibc-arm64-sd
6. milkv-duos-musl-riscv64-emmc
7. milkv-duos-musl-riscv64-sd
Which would you like:
- Duo (64M-DDR) 只有 RISC-V 核,默认为基于 musl libc 编译的 SD 卡镜像。
- Duo256M 支持 RISC-V 和 ARM 核(二选一),RISC-V 核固件基于 musl libc 编译,ARM 核固件基于 glibc 编译,只配置了 SD 卡镜像。
- DuoS 支持 RISC-V 和 ARM 核(二选一),RISC-V 核固件基于 musl libc 编译,ARM 核固件基于 glibc 编译,配置了 SD 卡和 eMMC 镜像。
第二种方法是脚本后面带上目标版本的名字,比如要编译 milkv-duos-musl-riscv64-sd 的镜像:
$ ./build.sh milkv-duos-musl-riscv64-sd
编译成功后可以在 out 目录下看到生成的镜像,其中 *.img 后缀的镜像为 SD 卡烧录的镜像,*.zip 后缀的镜像为 eMMC 的烧录镜像。
注: 第一次编译会自动下载所需的工具链,大小为 840M 左右,下载完会自动解压到 SDK 目录下的 host-tools 目录,下次编译时检测到已存在 host-tools 目录,就不会再次下载了
2、分步编译
如果未执行过一键编译脚本,需要先手动下载工具链 host-tools,再拷贝或移动到 SDK 根目录:
git clone https://github.com/milkv-duo/host-tools.git
cp -a host-tools duo-buildroot-sdk-v2/
加载环境:
source build/envsetup_milkv.sh
如果是第一次编译,会提示选择要编译的目标:
Select a target to build:
1. milkv-duo-musl-riscv64-sd
2. milkv-duo256m-glibc-arm64-sd
3. milkv-duo256m-musl-riscv64-sd
4. milkv-duos-glibc-arm64-emmc
5. milkv-duos-glibc-arm64-sd
6. milkv-duos-musl-riscv64-emmc
7. milkv-duos-musl-riscv64-sd
Which would you like:
选择对应的数字后,回车,成功加载环境变量后,会显示一些当前目标的信息,比如:
Target Board: milkv-duos-musl-riscv64-sd
Target Board Storage: sd
Target Board Config: /build/duo-buildroot-sdk-v2/device/target/boardconfig.sh
Target Image Config: /build/duo-buildroot-sdk-v2/device/target/genimage.cfg
Build tdl-sdk: 1
Output dir: /build/duo-buildroot-sdk-v2/install/soc_sg2000_milkv_duos_musl_riscv64_sd
环境加载完成后,会在 device 目录下创建一个名为 target 的链接,链接到编译目标目录,下次再 source 环境时,检测到该 target 链接存在时,就不会再提示选择目标了。如果需要更��换编译目标,可以加 lunch 参数重新调出交互菜单进行选择:
source build/envsetup_milkv.sh lunch
加载环境成功后,再依次输入如下命令完成分步编译:
clean_all
build_all
如果编译的是 SD 卡镜像,还需要再执行如下命令生成 img 镜像:
pack_sd_image
比如需要编译 milkv-duos-musl-riscv64-sd 的镜像,分步编译命令如下:
source build/envsetup_milkv.sh milkv-duos-musl-riscv64-sd
clean_all
build_all
pack_sd_image
生成的固件位置:
install/soc_sg2000_milkv_duos_musl_riscv64_sd/milkv-duos-musl-riscv64-sd.img
注意,SD 卡镜像为 *.img,eMMC镜像为 upgrade.zip。
除了使用 build_all 进行完整编译之外,还可以单独编译某个模块,一般来说都是先执行 clean_xxx 清理中间文件后,再执行 build_xxx 重新编译。支持的模块,可以输入 clean_ 或者 build_ 后,双击 tab 键查看。以下列出一些常用的模块编译方法:
- fsbl:
clean_fsbl,build_fsbl - uboot:
clean_uboot,build_uboot - kernel:
clean_kernel,build_kernel - osdrv:
clean_osdrv,build_osdrv - cvi_mpi:
clean_middleware,build_middleware - tdl-sdk:
clean_tdl_sdk,build_tdl_sdk
二、使用 Docker 编译
需要在运行 Linux 系统的主机上支持 Docker。 Docker 的使用方法请参考官方文档或其他教程。
我们将 SDK 代码放在 Linux 主机系统上,调用 Milk-V 提供的 Docker 镜像环境来编译。
在 Linux 主机上拉 SDK 代码
git clone https://github.com/milkv-duo/duo-buildroot-sdk-v2.git --depth=1
在编译过程中,Buildroot 会自动下载一些源码包。SDK V1 中已经集成了部分常用源码包,可以直接编译。SDK V2 中,为了避免由于网络原因导致下载失败,可以提前下载 dl.tar 包并解压到 buildroot 目录:
wget https://github.com/milkv-duo/duo-buildroot-sdk-v2/releases/download/dl/dl.tar
tar xvf ./dl.tar -C ./duo-buildroot-sdk-v2/buildroot/
解压后 duo-buildroot-sdk-v2 的 buildroot 中 dl 目录结构如下:
└── buildroot
└── dl
├── acl
├── alsa-lib
├── alsa-utils
├── attr
├── ...
进入 SDK 代码目录
cd duo-buildroot-sdk-v2
拉取 Docker 镜像并运行
docker run --privileged -itd --name duodocker -v $(pwd):/home/work milkvtech/milkv-duo:latest /bin/bash
命令中部分参数说明:
--privileged以特权模式启动容器。duodockerdocker 运行时名字,可以使用自己想用的名字。$(pwd)当前目录,这里是上一步 cd 到的 duo-buildroot-sdk 目录。-v $(pwd):/home/work将当前的代码目录绑定到 Docker 镜像里的 /home/work 目录。milkvtech/milkv-duo:latestMilk-V 提供的 Docker 镜像,第一次会自动从 hub.docker.com 下载。
Docker 运行成功后,可以用 docker ps -a 命令查看运行状态:
$ docker ps -a
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
8edea33c2239 milkvtech/milkv-duo:latest "/bin/bash" 2 hours ago Up 2 hours duodocker
如果 Docker 服务器上的镜像有更新,可以使用 docker pull milkvtech/milkv-duo:latest 命令来同步最新的镜像。
1. 使用 Docker 一键编译
docker exec -it duodocker /bin/bash -c "cd /home/work && cat /etc/issue && export FORCE_UNSAFE_CONFIGURE=1 && ./build.sh [board]"
注意命令最后的 ./build.sh [board] 和前面在 Ubuntu 22.04 中一键编译说明中的用法是一样的,直接 ./build.sh 可以查看命令的使用方法,用 ./build.sh lunch 可以调出交互选择菜单,用 ./build.sh [board] 可以直接编译目标版本,[board] 可以替换为:
milkv-duo-musl-riscv64-sd
milkv-duo256m-glibc-arm64-sd
milkv-duo256m-musl-riscv64-sd
milkv-duos-glibc-arm64-emmc
milkv-duos-glibc-arm64-sd
milkv-duos-musl-riscv64-emmc
milkv-duos-musl-riscv64-sd
命令中部分参数说明:
duodocker运行的 Docker 名字, 与上一步中设置的名字要保持一致"*"双引号中是要在 Docker 镜像中运行的 Shell 命令cd /home/work是切换到 /home/work 目录,由于运行时已经将该目录绑定到主机的代码目录,所以在 Docker 中 /home/work 目录就是该 SDK 的源码目录cat /etc/issue显示 Docker 使用的镜像的版本号,目前是 Ubuntu 22.04.3 LTS,调试用export FORCE_UNSAFE_CONFIGURE=1Docker 中默认使用 root 用户编译,需要使用该环境变量./build.sh [board]执行一键编译脚本
比如需要编译 milkv-duos-musl-riscv64-sd 的镜像,编译命令如下:
docker exec -it duodocker /bin/bash -c "cd /home/work && cat /etc/issue && export FORCE_UNSAFE_CONFIGURE=1 && ./build.sh milkv-duos-musl-riscv64-sd"
编译成功后可以在 out 目录下看到生成的SD卡烧录镜像 *.img
2. 使用 Docker 分步编译
如果未执行过一键编译脚本,需要先手动下载工具链 host-tools,再拷贝或移动到 SDK 根目录:
git clone https://github.com/milkv-duo/host-tools.git
cp -a host-tools duo-buildroot-sdk-v2/
分步编译需要登陆到 Docker 中进行操作,用命令 docker ps -a 查看并记录容器的 ID 号,比如 8edea33c2239。
如果 duodocker 未在列表中,可能是容器已停止,需要先将其重新运行后,再查看窗口的 ID 号:
cd duo-buildroot-sdk-v2/
docker run --privileged -itd --name duodocker -v $(pwd):/home/work milkvtech/milkv-duo:latest /bin/bash
docker ps -a
登陆到 Docker 中:
docker exec -it 8edea33c2239 /bin/bash
进入 Docker 中绑定的代码目录:
root@8edea33c2239:/# cd /home/work/
设置环境变量,Docker 中默认以 root 用户编译,需要配置该环境变量:
export FORCE_UNSAFE_CONFIGURE=1
加载环境:
source build/envsetup_milkv.sh
如果是第一次编译,会提示选择要编译的目标:
Select a target to build:
1. milkv-duo-musl-riscv64-sd
2. milkv-duo256m-glibc-arm64-sd
3. milkv-duo256m-musl-riscv64-sd
4. milkv-duos-glibc-arm64-emmc
5. milkv-duos-glibc-arm64-sd
6. milkv-duos-musl-riscv64-emmc
7. milkv-duos-musl-riscv64-sd
Which would you like:
选择对应的数字后,回车,成功加载环境变量后,会显示一些当前目标的信息�,比如:
Target Board: milkv-duos-musl-riscv64-sd
Target Board Storage: sd
Target Board Config: /build/duo-buildroot-sdk-v2/device/target/boardconfig.sh
Target Image Config: /build/duo-buildroot-sdk-v2/device/target/genimage.cfg
Build tdl-sdk: 1
Output dir: /build/duo-buildroot-sdk-v2/install/soc_sg2000_milkv_duos_musl_riscv64_sd
环境加载完成后,会在 device 目录下创建一个名为 target 的链接,链接到编译目标目录,下次再 source 环境时,检测到该 target 链接存在时,就不�会再提示选择目标了。如果需要更换编译目标,可以加 lunch 参数重新调出交互菜单进行选择:
source build/envsetup_milkv.sh lunch
加载环境成功后,再依次输入如下命令完成分步编译:
clean_all
build_all
如果编译的是 SD 卡镜像,还需要再执行如下命令生成 img 镜像:
pack_sd_image
比如需要编译 milkv-duos-musl-riscv64-sd 的镜像,分步编译命令如下:
source build/envsetup_milkv.sh milkv-duos-musl-riscv64-sd
clean_all
build_all
pack_sd_image
生成的固件位置:
install/soc_sg2000_milkv_duos_musl_riscv64_sd/milkv-duos-musl-riscv64-sd.img
注意,SD 卡镜像为 *.img,eMMC镜像为 upgrade.zip。
除了使用 build_all 进行完整编译之外,还可以单独编译某个模块,一般来说都是先执行 clean_xxx 清理中间文件后,再执行 build_xxx 重新编译。支持的模块,可以输入 clean_ 或者 build_ 后,双击 tab 键查看。以下列出一些常用的模块编译方法:
- fsbl:
clean_fsbl,build_fsbl - uboot:
clean_uboot,build_uboot - kernel:
clean_kernel,build_kernel - osdrv:
clean_osdrv,build_osdrv - cvi_mpi:
clean_middleware,build_middleware - tdl-sdk:
clean_tdl_sdk,build_tdl_sdk
编译完成后可以用 exit 命令退出 Docker 环境:
root@8edea33c2239:/home/work# exit
在主机代码目录中同样也可以看到生成的固件。
停用 Docker
编译完成后,如果不再需要以上的 Docker 运行环境,可先将其停止,再删除:
docker stop 8edea33c2239
docker rm 8edea33c2239
三、其他编译注意事项
如果您想尝试在以上两种环境之外的环境下编译本 SDK,下面是可能需要注意的事项,仅供参考。
cmake 版本号
注意:cmake 版本最低要求 3.16.5
查看系统中 cmake 的版本号
cmake --version
比如在Ubuntu 20.04中用 apt 安装的 cmake 版本号为
cmake version 3.16.3
不满足此SDK最低要求,需要手动安装目前最新的 3.27.6 版本
wget https://github.com/Kitware/CMake/releases/download/v3.27.6/cmake-3.27.6-linux-x86_64.sh
chmod +x cmake-3.27.6-linux-x86_64.sh
sudo sh cmake-3.27.6-linux-x86_64.sh --skip-license --prefix=/usr/local/
手动安装的 cmake 在 /usr/local/bin 中,此时用 cmake --version 命令查看其版本号, 应为
cmake version 3.27.6
使用 Windows Linux 子系统 (WSL) 进行编译
如果您希望使用 WSL 执行编译,则构建镜像时会遇到一个小问题,WSL 中的 $PATH 具有 Windows 环境变量,其中路径之间包含一些空格。
要解决此问题,您需要更改 /etc/wsl.conf 文件并添加以下行:
[interop]
appendWindowsPath = false
然后需要使用 wsl.exe --reboot 重新启动 WSL。再运行 ./build.sh 脚本或分步编译命令。
要恢复 /etc/wsl.conf 文件中的此更改,请将 appendWindowsPath 设置为 true。 要重新启动 WSL,您可以使用 Windows PowerShell 命令 wsl.exe --shutdown,然后使用wsl.exe,之后 Windows 环境变量在 $PATH 中再次可用。
四、添加应用包
Buildroot 是一个轻量级的嵌入式 Linux 系统构建框架,其生成的系统没有像 Ubuntu 系统一样的 apt 包管理工具来下载和使用应用包。Duo 默认的 SDK 已经添加了一些常用的工具或命令,如果您需要添加自己的应用,需要对 SDK 做一些修改后重新编译生成所需的系统固件。
以下介绍在 Buildroot 中添加应用包常用的几种方法。
开启 Busybox 中的命令
在使用 Buildroot 构建的系统中,部分基础命令由 busybox 提供,您可以查看 busybox 的配置文件中是否有您需要的命令,将其打开后重新编译即可,busybox 的配置文件位置在:
buildroot/package/busybox/busybox.config
比如 timeout 命令,打开的方法:
diff --git a/buildroot/package/busybox/busybox.config b/buildroot/package/busybox/busybox.config
index d7d58f064..b268cd6f8 100644
--- a/buildroot/package/busybox/busybox.config
+++ b/buildroot/package/busybox/busybox.config
@@ -304,7 +304,7 @@ CONFIG_TEST=y
CONFIG_TEST1=y
CONFIG_TEST2=y
CONFIG_FEATURE_TEST_64=y
-# CONFIG_TIMEOUT is not set
+CONFIG_TIMEOUT=y
CONFIG_TOUCH=y
# CONFIG_FEATURE_TOUCH_NODEREF is not set
CONFIG_FEATURE_TOUCH_SUSV3=y
参考该次提交: busybox: add timeout command
配置 Buildroot 中预置的应用包
另外,Buildroot 中预置了大量的应用包,通过下载源码编译的方式来生成所需的程序,Buildroot 预置的应用包可以在 buildroot/package 目录中查看。
配置使用或者禁用某个应用包,是在目标板的配置文件中实现的,以 milkv-duos-musl-riscv64-sd 目标为例,其 buildroot 配置文件是:
buildroot/configs/milkv-duos-musl-riscv64-sd_defconfig
我们可以在宿主机(比如 Ubuntu)上整体编译过一次 SDK 后,到 Buildroot 编译目录中通过命令行菜单交互的方式来配置相关的应用包。
-
进入 Buildroot 编译目录
cd buildroot/output/milkv-duos-musl-riscv64-sd/可以使用
make show-targets命令来查看当前已经使用的应用包:$ make show-targets
busybox coreutils dhcpcd dnsmasq dropbear duo-pinmux e2fsprogs evtest expat fio freetype gdb host-acl host-attr host-autoconf host-automake host-e2fsprogs host-fakeroot host-genimage host-libtool host-libzlib host-m4 host-makedevs host-mkpasswd host-patchelf host-pkgconf host-skeleton host-util-linux host-xz host-zlib htop ifupdown-scripts initscripts iperf3 json-c kmod libevent libffi libnl libopenssl libxml2 libxslt libzlib musl-compat-headers ncurses ntp openssl python-cffi python-evdev python-freetype python-lxml python-modbus-tk python-pillow python-pinpong python-pip python-psutil python-pycparser python-serial python-setuptools python-smbus-cffi python-spidev python3 skeleton skeleton-init-common skeleton-init-sysv spidev_test strace stress-ng tar toolchain toolchain-external toolchain-external-custom urandom-scripts util-linux wpa_supplicant zlib rootfs-ext2 rootfs-tar -
配置 Buildroot
执行
make menuconfig命令,调出交互菜单: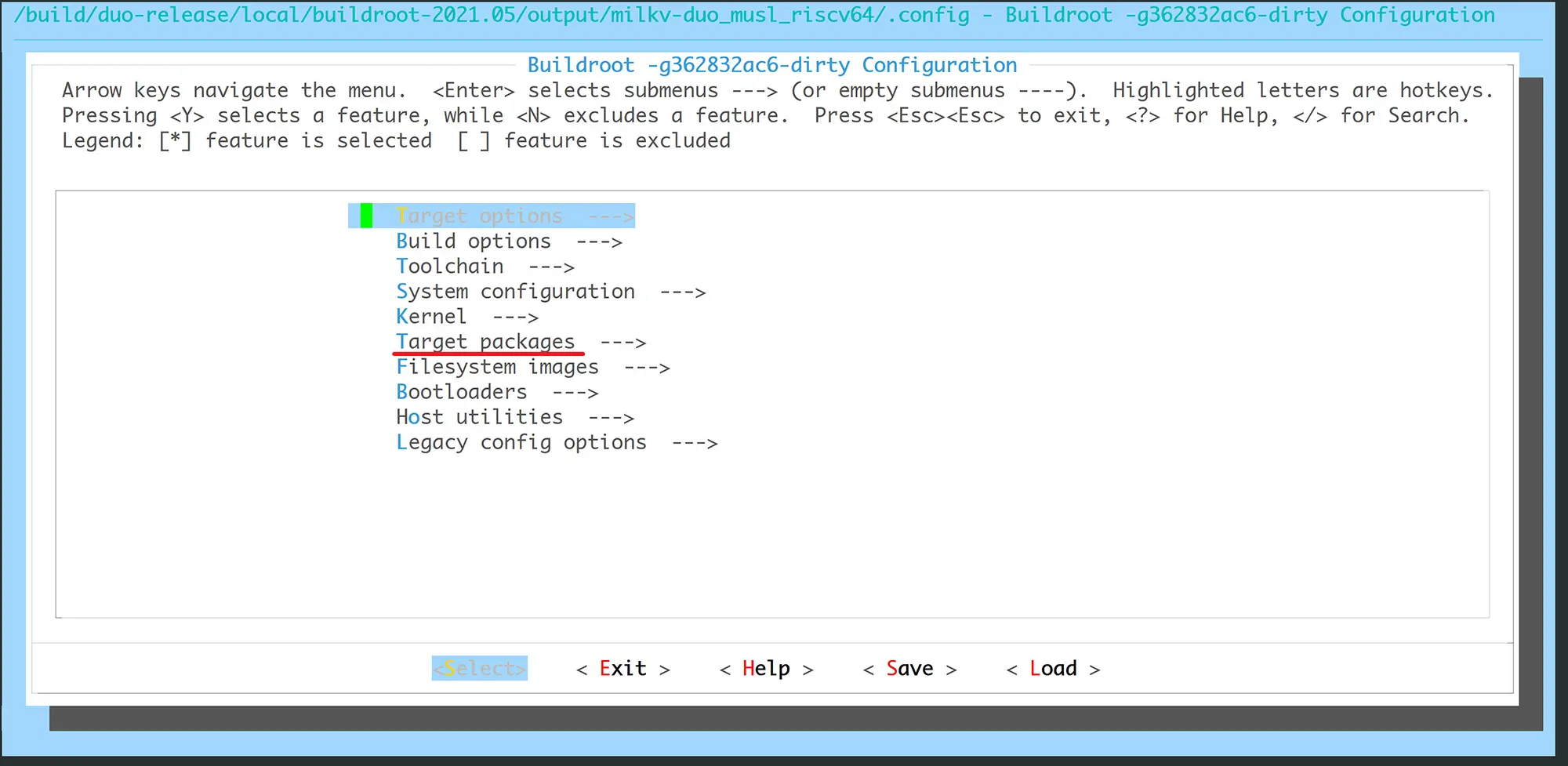
在
Target packages中根据分类找到所需的应用包,如果不清楚应用包具体的位置,可以按/键搜索包名,比如我们要安装tar命令,由于搜索tar会出来太多其他无关内容,可以搜索package_tar,可以看到,当前=n是禁用的状态,其位置为Target packages的System tools分类中,可以双击ESC键退回到主界面再进入到相应的位置,也可以按前面提示的数字直接进入到其所在的位置: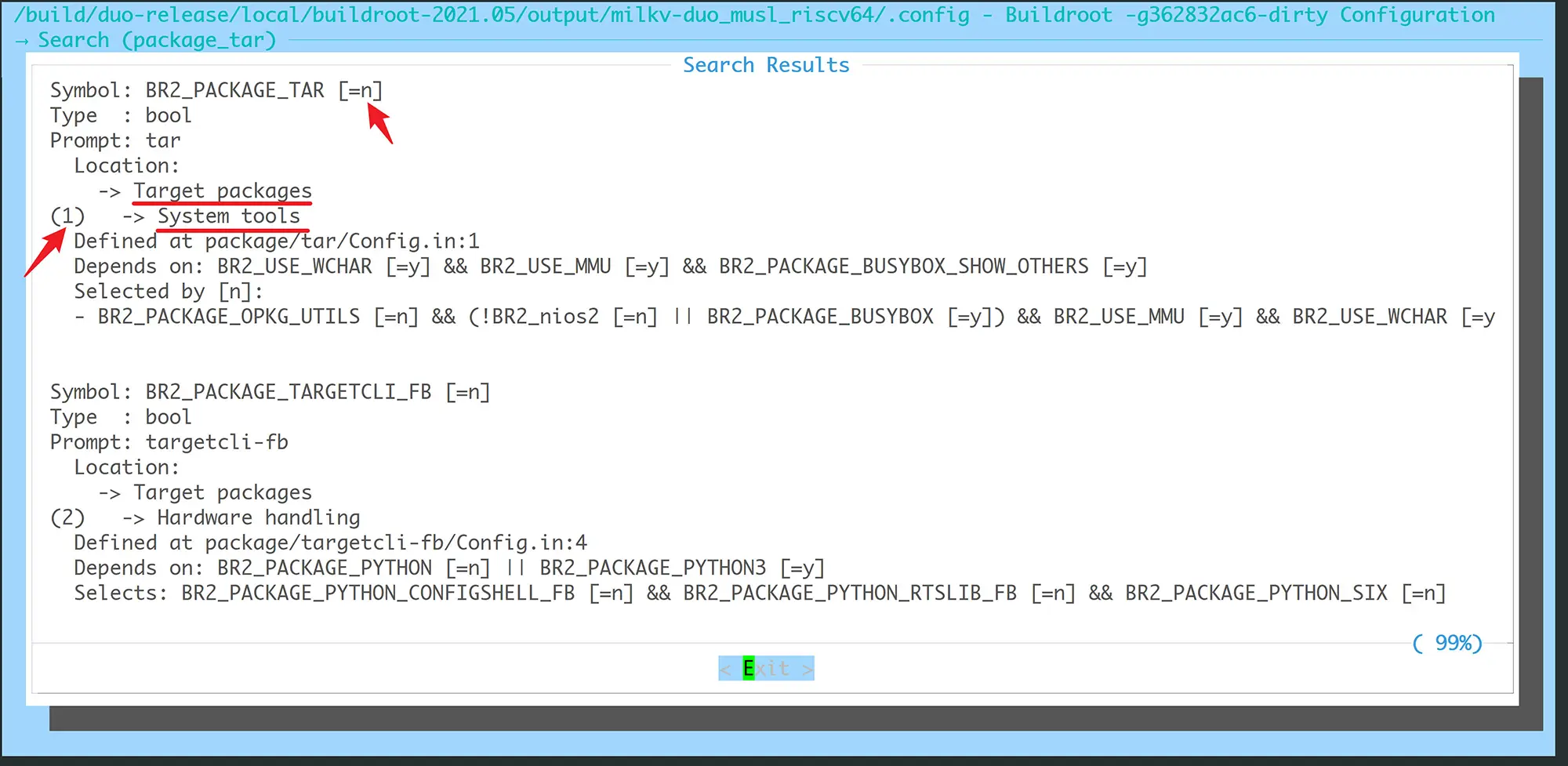
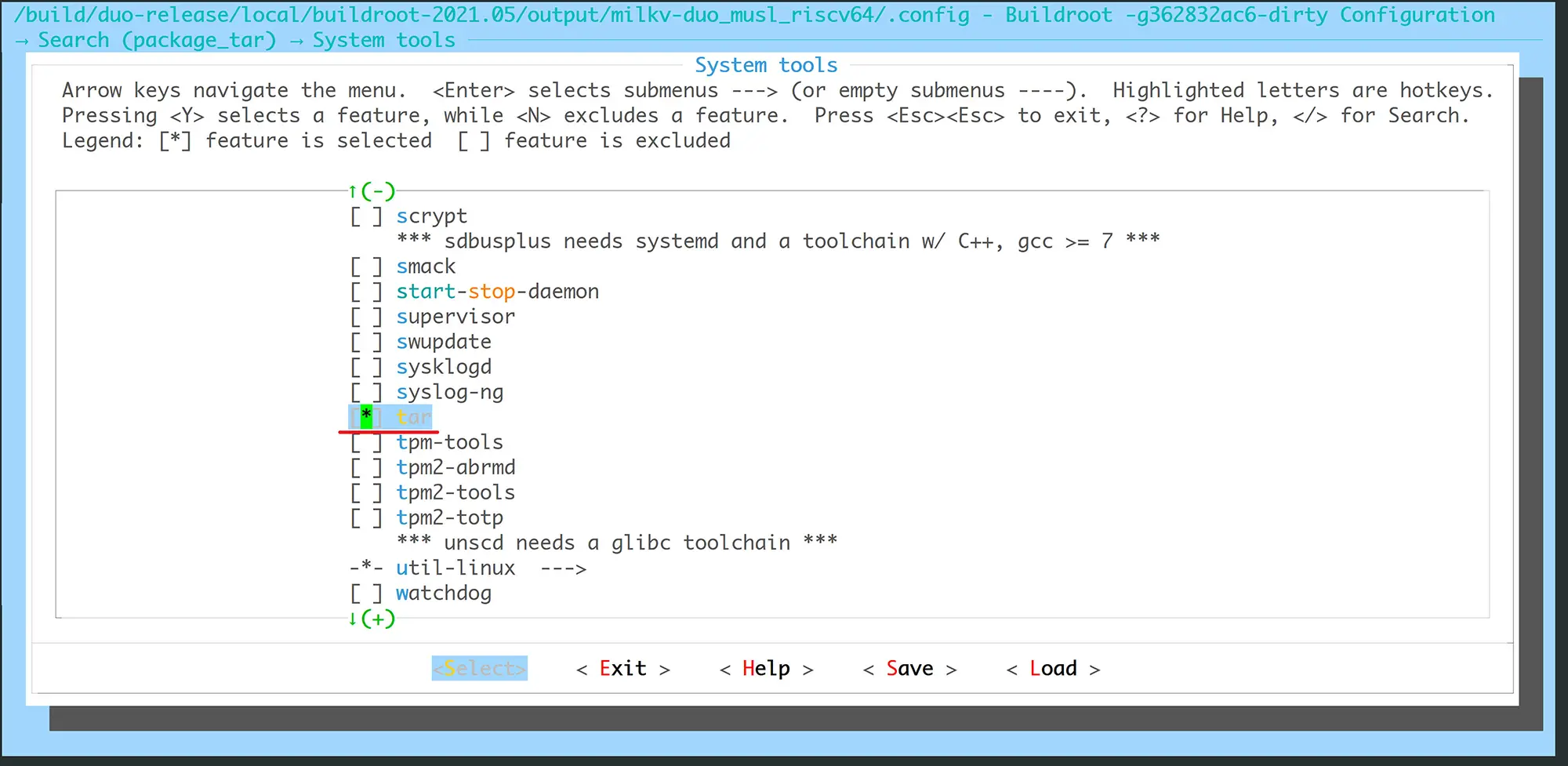
按空格键选中:
连续双击
ESC键退出主界面,提示是否保存时,默认是 YES, 直接回车保存退出: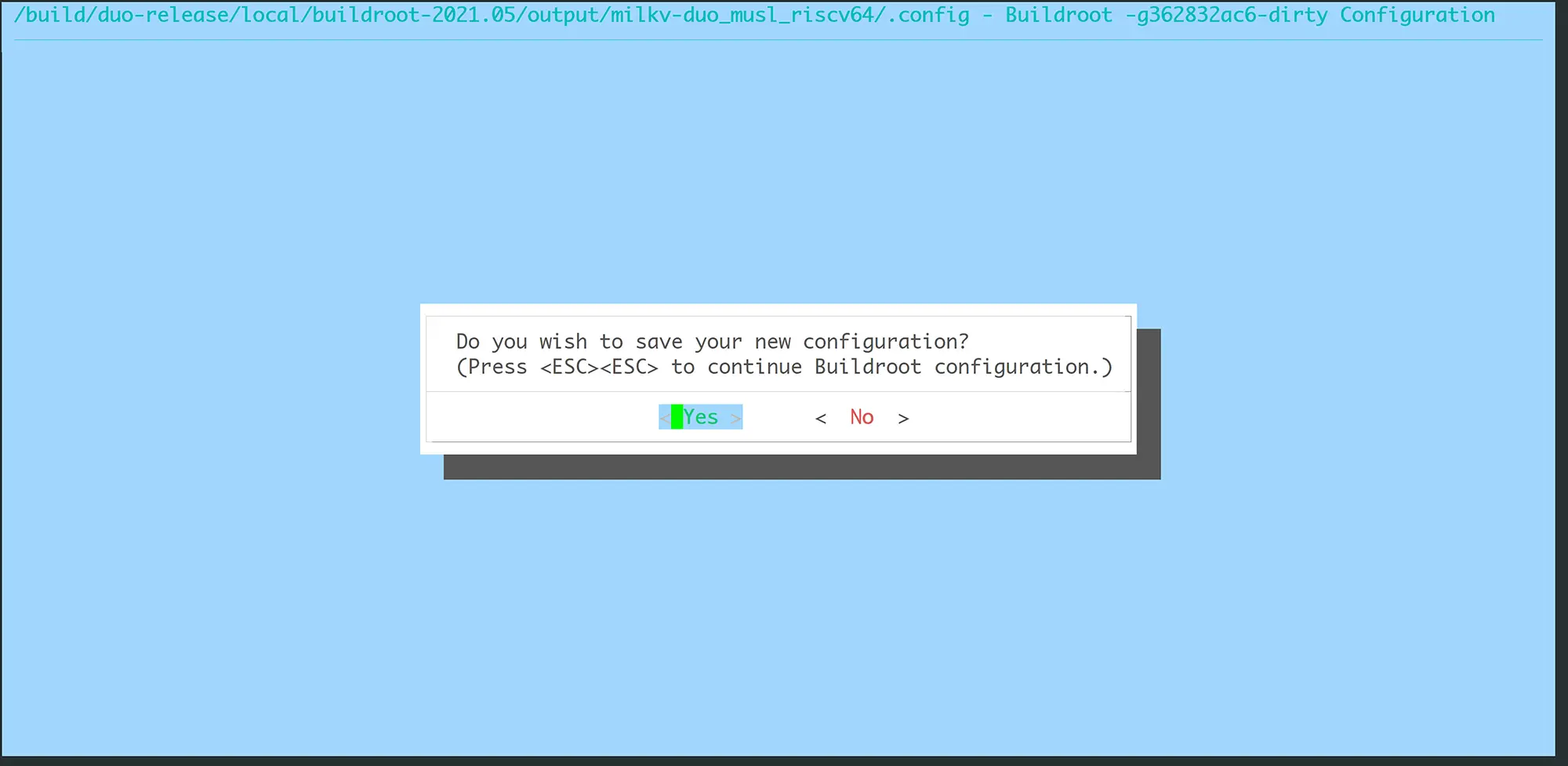
执行
make savedefconfig命令,将修改的配置保存到原始配置文件中,用git status命令确认一下,可以看到,原始配置文件已经被修改:
此时回到 SDK 根目录重新编译即可。
提示这里也可以比较一下编译目录中的旧配置文件和新配置文件的差异,把需要更改的部分直接手动修改到原始配置文件
milkv-duos-musl-riscv64-sd_defconfig中:diff -u .config.old .config使用新编译的镜像启动后,在 Duo 设备上测试新加的命令,如果出现
not found错误,可能是该包的.mk配置文件需要补充一下 gcc 的参数,主要是TARGET_CFLAGS和TARGET_LDFLAGS两个参数要加上,可以参考如下几个提交:
添加自己的应用包
编译测试自己的应用,不推荐集成到 Buildroot 工程中的方法。建议使用 duo-examples 的方式。
如果确实需要将自己的应用以 Buildroot package 方式编译,可以参考 Buildroot 中预置包的配置进行添加,以下是几个参考链接:
- buildroot: add python-evdev required by the pinpong library
- buildroot: add python-freetype required by the pinpong library
主要参考 buildroot-2021.05/package 中添加的内容。
五、删除不需要的应用包
如果你在自行编译固件的过程中,需要删除一些不需要的应用包来加快编译速度,或者禁用一些不需要的包,可以采用上述打开 Buildroot 应用包的 make menuconfig 方式,禁用相关的包。
也可以在 Buildroot 的配置文件中将对应的包名删除,以 milkv-duos-musl-riscv64-sd 目标为例,比如不需要编译 Python 相关的库,可以做如下修改后,重新编译生成固件即可。
diff --git a/buildroot/configs/milkv-duos-musl-riscv64-sd_defconfig b/buildroot/configs/milkv-duos-musl-riscv64-sd_defconfig
index 2bc8cd5e3..e78901afb 100644
--- a/buildroot/configs/milkv-duos-musl-riscv64-sd_defconfig
+++ b/buildroot/configs/milkv-duos-musl-riscv64-sd_defconfig
@@ -330,25 +330,6 @@ BR2_PACKAGE_EVTEST=y
# BR2_PACKAGE_FCONFIG is not set
BR2_PACKAGE_FLASHROM_ARCH_SUPPORTS=y
-BR2_PACKAGE_PYTHON3=y
-BR2_PACKAGE_PYTHON3_PY_PYC=y
-BR2_PACKAGE_PYTHON_LXML=y
-BR2_PACKAGE_PYTHON_PIP=y
-BR2_PACKAGE_PYTHON_SETUPTOOLS=y
-BR2_PACKAGE_PYTHON3_SSL=y
-
-BR2_PACKAGE_PYTHON_SERIAL=y
-BR2_PACKAGE_PYTHON_PILLOW=y
-BR2_PACKAGE_PYTHON_SMBUS_CFFI=y
-BR2_PACKAGE_PYTHON_SPIDEV=y
-BR2_PACKAGE_PYTHON_MODBUS_TK=y
-BR2_PACKAGE_PYTHON_EVDEV=y
-BR2_PACKAGE_PYTHON_FREETYPE=y
-
-BR2_PACKAGE_PYTHON_PINPONG=y
-
-BR2_PACKAGE_PYTHON_PSUTIL=y
-
#
# Compression and decompression
#
六、常见问题
Buildroot 编译出错排查方法
SDK 中 Buildroot 默认开启了顶层并行编译以加快编译速度,但是编译出错时,不方便分析出错的日志,所以我们可以先在 config 文件中将其删除,待排解决了问题之后,再将其重新打开。
以 milkv-duos-musl-riscv64-sd 目标为例,在其配置文件中将该配置删除后,再删除 buildroot/output 目录,重新编译:
BR2_PER_PACKAGE_DIRECTORIES=y
编译出错时除了查看编译终端的出错信息,还可以查看 build/br.log 中的完整日志进行排查。
Buildroot 软件包下载失败
在编译过程中,Buildroot 会自动下载一些源码包。SDK V1 中已经集成了部分常用源码包,可以直接编译。SDK V2 中,为了避免由于网络原因导致下载失败,可以提前下载 dl.tar 包并解压到 buildroot 目录后,再重新编译:
rm -rf ./buildroot/output ./buildroot/dl
wget https://github.com/milkv-duo/duo-buildroot-sdk-v2/releases/download/dl/dl.tar
tar xvf ./dl.tar -C ./buildroot/
解压后 buildroot 中 dl 目录结构如下:
└── buildroot
└── dl
├── acl
├── alsa-lib
├── alsa-utils
├── attr
├── ...






